CMAC網絡在機器人手眼系統位置控制中的應用

摘要:在機器人手眼系統位置控制中,用CMAC神經網絡建立了機器人非線性視覺映射關系模型,實現了圖像坐標到機器人坐標的變換。該模型采用了一種新的多維CMAC網絡的處理方法——疊加處理法。實驗,與BP網絡相比,CMAC網絡能以羅高的精度和較快的速度完成手眼系統的坐標變換。
本文引用地址:http://www.j9360.com/article/161767.htm近年來,在智能機器人領域,關于機器人手眼系統位置控制問題的研究受到越來越多的關注。在研究中發現存在這樣一個問題,即如何以較高的精度和較快的速度實現機器人手眼系統位置控制,以使機器人能快速實現對目標物體的準確定位和自動抓取。這個問題也就是機器人手眼系統中非線性視覺映射關系模型的建模問題。采用精確的數學模型是機器人視覺系統傳統的建模方法。但由于這類問題是高度的非線性問題,參數多且其間的相關性強,故這種方法理論上雖然精確,但是建模困難、計算量大,實時性差且沒有容錯能力和自學習能力,而神經網絡作為一種智能信息處理的新技術,具有極強的非線性映射能力。因此采用神經網絡的建模方法與傳統的方法相比具有極大的優越性。
作者已經采用BP網絡建立了機器人視覺系統的映射模型,并作了初步的研究和實驗。結果發現,采用神經網絡建立機器人視覺映射模型是一種有效的建模方法。但采用BP網絡建立模型存在網絡規模大、訓練時間長、容易陷入局部最小解、定位精度較低等缺點。本文采用CMAC神經網絡建立了機器人視覺系統的映射模型,取得了十分令人滿意的效果。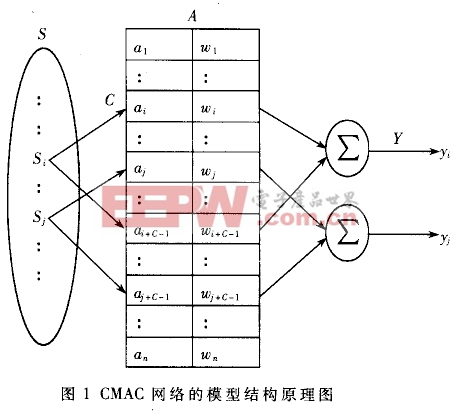
1 CMAC神經網絡簡介
小腦模型關節控制器神經網絡(Cerebellar Model Articulation Controller Neural Network,即CMAC神經網絡)是Albus根據小腦的生物模型提出的一種人工神經網絡。它學習速度快,具有局域泛化能力,能夠克服BP網絡容易陷入局部最小點的問題,且硬件易于實現。目前,CMAC神經網絡被廣泛應用于機器人控制、非線性函數映射、模式識別以及自適應控制等領域。
1.1 CMAC的基本結構和原理
CMAC神經網絡的模型結構原理圖如圖1所示。它本質上可看作是一種用于表示復雜非線性函數的查表結構。
圖1中,S為n維輸入矢量空間;A為聯想記憶空間;Y是輸出響應矢量。輸入空間S中的每一矢量S(…,Si,…,Sj,…)被量化后送人存鍺區A,每個輸入變量Si激活存儲區A中C個連續存儲單元。網絡輸出yi為這C個對應單元中值(即權wi)的累加結果,對某一輸入樣本,總可通過調整權值達到期望輸出值。由圖1可以看出,每一輸入樣本對應于存儲區A中的C個單元,當各樣本分散存儲在A中時,在S中比較靠近的那些樣本就會在A中出現交疊現象,其輸出值也比較相近,即這C個單元遵循輸入相鄰,輸出相近的原則,這種現象被稱為CMAC神經網絡的局部泛化特性,C為泛化參數:C越大,對樣本的映射關系影響越大,泛化能力越好。
CMAC網絡的學習采用誤差糾正算法,計算量少斂速度快。其權值修正公式及輸出可表示如下:

式中,η為學習步長,yd為期望輸出,mi為輸入變量S激活存儲單元的首地址。修正方法可以采用每個樣本修正一次的增量學習方法,也可以采用所有樣本都輸入一輪后再修正的批量學習方法。
1.2 多維CMAC網絡的計算方法
由上述CMAC模型的算法可知,應用傳統的多維CMAC概念映射算法會因輸入維數的增大而使存儲空間劇烈增大,從而使網絡計算量增大,收斂速度變慢。這里采用一種新的多維CMAC網絡的處理方法--疊加處理法。即把輸入空間為n維的多維CMAC網絡看作是由n個一維CMAC網絡疊加而成,其輸出為n個一維子網絡的輸出的疊加。par
當輸入空間的維數n=1時,對于每一個輸入變量,都激活C個連續存儲單元,即有C個對應單元的權值輸出非零。它的激勵情況如表l所示。










評論