開放數控系統模型的建立及實現

“NC嵌入PC”的開放式數控系統結構模型,充分利用了PC機的豐富資源(內存空間大、硬盤容量大和高速運算功能的CPU),使這種結構模式成為開放數控系統的主流設計。DSP因其高速、強實時控制能力而迅速得到了廣泛的應用,但由于其有限的PWM輸出口,要實現多軸控制,單個DSP芯片就顯得鞭長莫及。在多軸控制卡設計中,最常用的有三種設計方案:(1)采用主DSP作為主控制器,實現對多個從DSP節點的監控和管理,每個從DSP控制一個軸運動,多個從DSP芯片通過總線與主DSP芯片進行通訊,形成一個主從式的分布式控制結構;(2)DSP只負責復雜的控制算法,發送數據給FPGA,FPGA存儲DSP最新的脈沖寬度,發出PWM波,控制多軸運動;(3)單個DSP負責復雜的控制算法,通過輸出選擇邏輯開關來選擇D/A通道,驅動電機軸運動。高速F2812 DSP芯片和大容量可編程邏輯器件FPGA的出現,使單個DSP控制多軸運動成為可能。利用FPGA的并行性對DSP的PWM功能進行擴展,從而可實現高精度的不同電機的多軸控制,并且FPGA和DSP都支持在系統可編程,因此大大縮短了設計周期,而且在硬件不變的情況下,可以根據需要通過修改軟件以擴展功能,體現出其良好的硬件平臺開放性。
本文引用地址:http://www.j9360.com/article/161516.htmF2812 DSP是TI公司最新推出的32位定點處理器,系統處理能力為150MIPS,指令周期6.67ns,實時控制能力很強。兩個事件管理器模塊EVA、EVB中各有兩個通用定時器,三個完全比較單元,能夠支持8通道的16位PWM輸出。在電流環等采樣獲取中,因其頻率比較高(20kHz),每測一次電流就重新調整新的PWM波的脈沖寬度,如果EVA、EVB同時工作,在定時器中斷響應時可能檢測不到電流的變化,這樣對于16位的DSP處理器的兩個EV只能有一個得到有效的應用。但是F2812高達150MIPS的處理能力,能夠很好的捕捉到電流的變化,定時器中斷也能得到及時響應,其EVA、EVB能夠同時得到應用。因此,一片F2812 DSP能夠很好地控制兩臺三相伺服電機和四臺步進電機。
圖1為開放數控系統的結構模型,在硬件方面實現了模塊化設計,通過ISA總線與PC機通訊,由PC機控制各實時模塊的協調工作。對伺服電機的驅動信號,由F2812 DSP通過其EVA、EVB完成兩通道的PWM波形輸出,FPGA擴展PWM功能,完成另兩通道PWM的控制輸出;對步進電機的驅動,全部由F2812 DSP的EV完成,控制四軸聯動。充分利用了F2812 DSP的內部資源和FPGA的速度快、多路并行、靈活性高的優點。
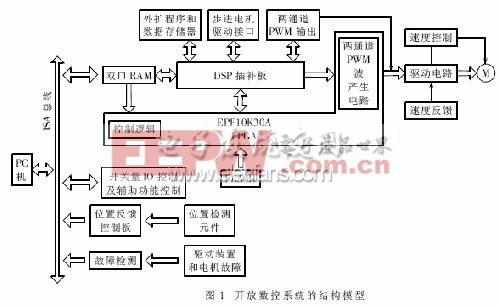
本數控模型包括六部分:
(1)DSP插補板,由DSP完成比較復雜的插補和位置控制計算,并通過事件管理器控制兩電機軸的驅動信號的產生。FPGA接收DSP最新脈沖寬度,產生PWM控制信號,控制多種電機(步進電動機、直流電動機、交流電動機)的驅動電路。
(2)位置反饋,主要用于閉環和半閉環數控系統中。半閉環系統中,用于檢測絲杠或電機軸的回轉角,間接測出機床運動部件的位移,經位置反饋裝置進行處理后通過總線送回到控制系統和伺服系統,并與控制指令相比較,經過位置控制計算,精確控制電機的運行。閉環系統中,直接測出工作臺的實際位置,然后通過位置控制控制電機運行。位置反饋模塊作為單獨的模塊通過總線與PC機進行通訊,用戶可根據實際要求設計自己的反饋模塊,而與DSP插補板沒有關系,從而體現其開放性。
(3)開關量I/O控制和輔助功能控制。I/O控制是CNC裝置和機床驅動部件之間傳遞信息的接口,主要用于接收各種開關、按鈕以及機床上各行程限位開關等信號。輔助功能也通過I/O端口實現,常用的輔助功能有程序停,主軸啟、停、轉向,冷卻泵的接通和斷開,刀庫的起、停等。
(4)故障檢測功能,主要對驅動電路、電機運行方面等進行故障檢查,對故障的原因進行定位和報警提示,保護硬件電路的運行。例如電流過限、短路、斷路、電壓過高或過低等硬件故障。由于DSP有錯誤自檢的功能,可以自己設計軟硬件處理故障的電路,用于保護DSP的正常運行,例如看門狗電路、 存儲器讀寫錯誤、指令溢出、過載等錯誤。
(5)驅動單元,設計三種不同電機的帶有速度控制的驅動裝置。
(6)PC機功能設計,完成數據參數的輸入,運動控制監視,手動操作,通過總線與其他實時控制單元通信,提供友好的人機界面,編寫各控制單元的通信軟件。
2 軟件開放性設計
在軟件設計方面,許多開放式數控系統均采用面向對象(OOP)的技術,將數控功能模塊化,構建基本類庫。利用派生功能,當需要擴展某基類的功能時,通過從基類中派生出新的基類來完成新的功能,較好地實現了軟件重用和二次開發的功能。這種傳統的OOP技術僅僅是軟件源代碼級的可重用,它存在互操作能力差、可移植性不強、擴展不方便等缺點,不能很好滿足一個開放式數控系統所強調的要求。在數控系統中引入COM作為底層支持可以更好的滿足數控系統開放的要求。COM技術中組件的二進制級交互保證了所構建出的數控系統具有良好的可重用性,可以快速方便地擴展,而不必再關注數控組件的內部實現,擴充功能時只需要修改或更換相關的組件而不必再重新編譯原系統,可以快速滿足新的生產需要,提高軟件的開發效率和可維護性。
為了更好地實現軟件的重用性和二次開發功能,將與底層無關的軟件功能用WDM技術實現。WDM(Windows Driver Model)是Microsoft為Windows 98和Windows 2000作業系統提供一系列I/O服務及二進制相容設備的驅動方式,有助于減少在Windows平臺上對硬件設定所花費的成本。在PC端,PC和運動控制卡之間進行中斷和I/O操作的接口采用WDM實現,將與硬件有關的操作屏蔽起來。對應用程序而言,可見的是一個虛擬化的設備對象,PC程序可以根據任務的實時性來選擇和控制卡的通訊方式。對于實時性要求高的緊迫任務,如緊急停車或出錯處理,應用程序可以用直接寫端口的方式向控制卡發送中斷請求。而對于一般實時性和大批量的數據傳輸的任務,應用程序可以用與WDM進行消息映射的方式完成,然后再完成硬件的相關操作。通過模塊化的WDM體系結構中靈活統一的接口,使操作系統可以動態地配置不同的驅動程序模塊來支持特定的設備。這樣更好的體現了軟件的重用性和可移植性,利于軟件的二次開發。表1描述了軟件的層次結構。


伺服電機相關文章:伺服電機工作原理





評論