基于DSP的NNC-PID控制器電液位置控制系統實現

本文引用地址:http://www.j9360.com/article/160814.htm

根據有監督的Hebb學習規則,權系數按式(12)~式(14)規律調整如下:

式中,K為神經元比例系數,ηI、ηP、ηD分別為積分、比例、微分的學習速率。
4 系統軟件設計
系統的軟件設計主要分為兩部分,使用Labview編寫的PC機程序和用C語言編寫的DSP程序,其中PC機的程序用來顯示和處理DSP發送來的數據,并向DSP發送指令及調節參數。
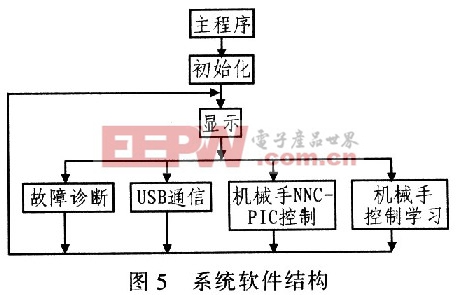
DSP的系統軟件設計是在CCS2000的開發系統下采用C語言設計和編寫,采用自頂向下的設計思路,按功能劃分軟件模塊,系統軟件如圖5所示,主要由初始化模塊、故障診斷、USB通信模塊、機械手NNC控制學習模塊和機械手NNC-PID控制模塊等組成。
5 試驗結果
對電液位置伺服機械手系統首先采用常規的PID控制,利用Ziegler-Nichols方法整定PID參數,即控制系統在純比例控制下,調整比例增益,使系統達剜臨界穩定,記錄這時的增益ku和臨界振蕩周期Tu,即可確定PID的參數,即:kp=0.6Tu,kI=0.5Tu,kD=0.25Tu,最后確定比例、積分、微分系數分別為:kP=1.02,kI=0.024,kD=0.006,這時系數的位置階躍跟蹤響應如圖6所示。在同等情況下,采用神經網絡NNC-PID控制方法對電液位置伺服機械手系統進行控制,取NNC的初始權值為PID的調定值,即:v1(0)=1.02,V2(0)=0.024,V3(0)=0.00 6,為了保證迭代的穩定性,限制權值的迭代范圍:0.1≤v(1)≤1.3,0.001≤v(2)≤0.06,0.001≤v(3)≤5,這時系統的位置跟蹤響應曲線如圖6所示。通過對比可以看出利用神經網絡NNC-PID方法,由于具有學習能力,使系統很快收斂于位置穩態值,神經網絡NNC-PID控制由于能夠實時調整PID參數,使系統的控制性能得到提高,同時對參數時變表現出良好的魯棒性,很好地解決了液壓系統的非線性和參數時變問題。

需要注意的是,神經元比例系數K的選擇對系統的控制性能影響最重要,過大或過小都將導致系統性能變差,甚至不能實現自尋優和自適應。而ηP、ηI、ηD對系統的性能影響體現在學習速度的快慢上。
6 結束語
通過分析電液位置伺服機械手運行調試的特點及其對控制器電路的要求,采用一種基于神經網絡NNC-PID控制器的PC機+DSP的控制方案,對電液位置伺服PC機+DSP控制系統硬、軟件進行設計,并詳細分析了硬件各控制子系統的功能、特點及制版要求,說明了基于神經網絡NNC-PID的控制器軟件設計過程以及軟件的編制和調試。經過實驗室對比運行說明,基于神經網絡NNC-PID控制器的電液位置伺服機械手PC機+DSP控制系統的控制效果良好,控制器工作可靠,并且參數調節方便。

pid控制器相關文章:pid控制器原理











評論