永磁同步電機數字交流伺服控制技術分析

隨著現代工業對精密化、高速化、高性能的要求的不斷發展,傳統的控制器在高要求的場合已經不能夠勝任,在很多要求高實時性,高效率的場合,就必須要用專門的數字信號處理器(DSP)來代替傳統的控制器的部分功能。特別是在控制算法復雜或對算法進行改進優化的時候,DSP獨特的快速計算的能力就明顯的體現出來。
另外,隨著集成電路制造技術的進步和電力電子技術的發展,交流伺服也得到了長足的發展。集三相逆變器和保護電路、隔離電路、能耗制動電路等功能為一體的智能功率模塊、先進的電力電子器件的出現、使交流伺服控制更方便、功耗更低、開關時間更短、變頻范圍更寬、性能更優越。這些都使交流伺服相對直流伺服體現出了明顯的優越性。
1 系統概述
交流伺服數字化系統的硬件由DSP作為信號處理器,用旋轉編碼器和電流傳感器提供反饋信號,智能功率模塊IPM作為逆變器,經傳感器出來的信號經過濾波整形等處理后反饋給DSP進行運算,DSP經過對參考信號和反饋信號的處理運算來調節伺服系統的電流環,速度環,和位置環的控制,最后輸出PWM信號經過隔離驅動IPM模塊實現電機的伺服閉環控制。系統的硬件結構如圖1所示。
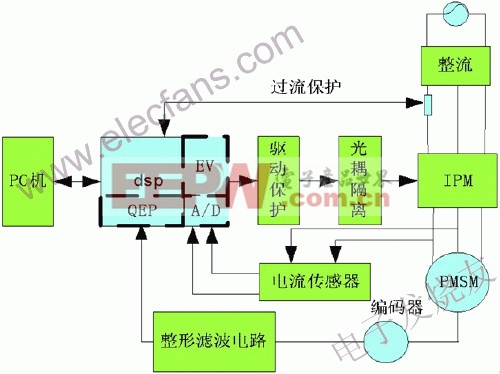
圖1硬件結構圖
系統的控制為三環控制方式,位置控制是外環,也是最終目標,速度控制是中環,電流控制是內環。為了保證動態響應速度和定位時不產生震蕩,電流環和速度環均采用PID調節,位置調節器采用PI調節。系統的控制框圖如圖2:
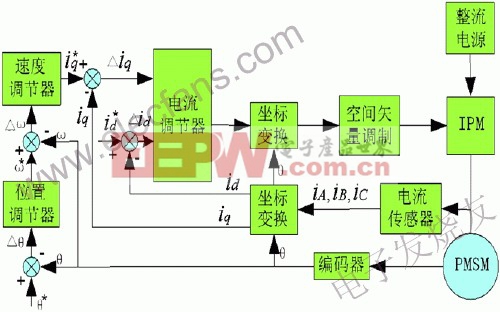
圖2控制系統框圖
編碼器檢測的轉子位置實際信號與系統給定位置信號進行比較,比較后的差值經位置調節器PI調節后輸出轉子轉速給定信號,給定轉速信號再與編碼器檢測的實際速度信號進行比較,比較后的差值經速度調節器調節后,輸出給定電流指令值,在于電流反饋實際值比較后進行PWM控制。
2 矢量控制
在同步電機中,勵磁磁場與電樞磁通勢間的空間角度不是固定的,因此調節電樞電流就不能直接控制電磁轉矩。通過電機的外部控制系統,對電樞磁通勢相對勵磁磁場進行空間定向控制,控制兩者之間的角度保持固定值,同時對電樞電流的幅值也進行控制,這種控制方式就稱為矢量控制。

伺服電機相關文章:伺服電機工作原理










評論