利用電磁導航的AGV設計

摘要:隨著物流系統的迅速發展,AGV的應用范圍也在不斷擴展,為了滿足用戶功能、價格、質量方面需求的AGV系統,研究設計了一種基于電磁導航的無人駕駛小車系統方案。通過實際硬件實驗,系統能夠達到預期設計要求,能夠廣泛運用于工業、軍事、交通運輸、電子等領域,具有良好的環境適應能力,很強的抗干擾能力和目標識別能力。
關鍵詞:電磁導航;AGV;無線傳輸;控制算法
0 引言
AGV(Automated Guided Vehicle)是指裝備有電磁或光學等自動導引裝置,能夠沿規定的導引路徑行駛,具有各種移載功能的運輸車。無人AGV廣泛地應用于現代工業控制系統中,能完成人工條件下不能完成的任務,可以保障系統在不需要人工導航的情況下自動行駛。
AGV包含了自動控制系統、引導方式的系統和信息無線傳輸等部分。通過各種算法研究,該設計有效地確定了小車的位置且能很好控制小車運行狀態。小車運行時,可以實時采集數據并傳回電腦,從而很好地對周圍環境進行監控。系統利用電磁軌道(Electromagnetic path-following System)設立其行進路線,電磁軌道黏貼於地板上,無人搬運車則依循電磁軌道所帶來的信息進行移動與動作,并自動采集相關信息。根據小車采集的信息,上位機給小車發送指令,控制攝像頭轉動,以便獲取不同區域的視頻信息。
1 系統硬件設計
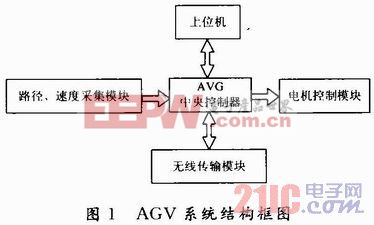
AGV系統結構框如圖1所示,上位機首先通過遙控的方式給小車指定運行路徑;小車上的電磁傳感器將采集到的電磁信號經過放大檢波變成直流電壓信號,單片機再對該信號進行模/數轉換,利用PID算法,獲取小車距離中心位置的偏差,再把差值賦給舵機,從而實現小車沿著導線的中心自動運行;最后,小車采集的數據實時傳回電腦顯示,與此同時,上位機可給小車發出指令,讓小車執行相關任務。
1.1 中央控制器
中央處理器采用Freescale公司推出的S12系列單片機中的一款增強型16位單片機MC9S12DG128(以下簡稱DG128),片內資源及I/O接口豐富,接口模塊包括SPI,SCI,IIC,A/D,PWM等,在汽車電子應用領域具有廣泛的用途。
MC9S12G128的單片運行方式是最常用的應用方式。因片內已經有較大的RAM,FLASH空間,一般無需擴展外部RAM或外部FLASH。本設計應用DG128來實現對系統的總體控制。
1.2 速度采集模塊
速度檢測利用霍爾效應來實現。當一塊通有電流的金屬或半導體薄片垂直地放在磁場中時,薄片的兩端就會產生電位差,兩端具有的電位差值稱為霍爾電勢U,其表達式為:
U=K·I·B/d (1)
式中:K為霍爾系數;I為薄片中通過的電流;B為外加磁場(洛倫茲力Lorrentz)的磁感應強度;d是薄片的厚度。
霍爾片的輸入端是以磁感應強度B來表征的,當B值達到一定的程度時,霍爾開關內部的觸發器翻轉,霍爾開關的輸出電平狀態也隨之翻轉。輸出端一般采用晶體管輸出,和接近開關類似。當有磁鋼接近霍爾片的時候時(在一定的距離范圍內才有反應),設置單片機定時器的時間為t,計數器計數為n,一個轉盤上的磁鋼數量為s,則轉速(單位:r/s)的計數公式為:
speed=(n/s)/t (2)








評論