基于卡爾曼濾波器及多傳感狀態(tài)的融合估計算法介紹


本文引用地址:http://www.j9360.com/article/160244.htm
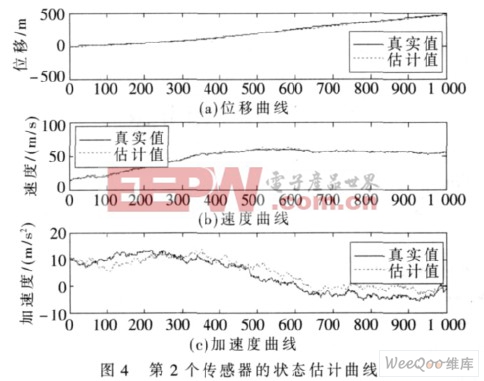
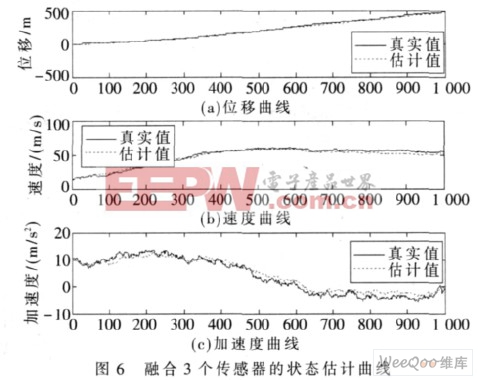
信息融合技術(shù)具有提高系統(tǒng)的可靠性和穩(wěn)定性等優(yōu)點, 狀態(tài)融合估計是其中研究熱點之一。本文將基于Kalman 濾波的多傳感器狀態(tài)融合估計方法應(yīng)用到雷達(dá)跟蹤系統(tǒng), 仿真實驗表明, 融合3 個傳感器的信息所獲得的狀態(tài)估計誤差小于利用任何單傳感器進(jìn)行Kalman濾波得出的狀態(tài)估計誤差, 因而本方法對雷達(dá)系統(tǒng)的跟蹤是很有效的。本方法可推廣用于組合導(dǎo)航、信號處理、圖像處理、故障檢測與容錯等應(yīng)用領(lǐng)域。







評論