基于F2808的永磁同步電機伺服系統設計

摘要:設計了一種基于DSF F2808的永磁同步電機(PMSM)伺服控制系統,系統基于轉子磁場定向矢量控制方法,結合工程實際,采用了直流母線電壓紋波補償、遇限削弱積分PI控制算法、防振蕩處理等控制策略,實現PMSM伺服控制,設計了交流伺服控制系統軟硬件,并得到了相應實驗結果,驗證了上述方法的有效性與合理性。
關鍵詞:同步電機;伺服控制;工程設計
1 引言
與其他電機相比,PMSM構成的交流伺服系統具有明顯的優勢,如效率高、低速性能好、轉子慣量小等,因此研究PMSM構成的高性能驅動和伺服控制系統,具有重要的理論意義和實用價值。針對PMSM控制的工程實際,設計了一種基于DSP F2808的數字伺服控制系統,采用直流母線電壓紋波補償、遇限削弱積分PI控制算法、防振蕩處理等控制策略,實現PMSM高性能伺服控制,給出了伺服控制系統相關原理、軟硬件設計和實驗結果。基于上述方法開發的控制裝置具有良好的性能,已獲得實際應用。
2 交流伺服控制系統的相關控制方法
2.1 PMSM轉子磁場定向矢量控制
在d,q旋轉坐標系下,轉子磁場定向矢量控制的PMSM電壓、磁鏈方程為:
式中:Rs為定子繞組電阻;ω為磁場旋轉速度;ψsd,ψsq,Ld,Lq,id,iq分別為d,q軸方向上的磁鏈、電感和電流分量;ψM為永磁體磁鏈。
當控制isd=0時,電機電磁轉矩方程為:
Te=3npψMisq/2 (2)
Te與isq成正比,控制isq可使PMSM獲得快速的轉矩響應。
2.2 直流母線電壓紋波補償
實際系統中,輸入電壓的波動和電機負載的擾動會引起變頻器直流母線電壓波動。為減少母線電壓紋波擾動對PWM輸出電壓的影響,需對直流母線電壓進行合適的紋波補償,具體方法是在定子參考電壓Usα,β方向分量各乘一個加權系數,計算方法如下: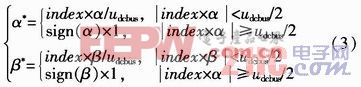
式中:index為調制系數,滿足0index1,其具體值取決于輸出電壓的調制方式;x為Us在α,β方向的向量輸入,x=α,β;α*,β*為α,β方向的向量輸出。
在這里采用的SVPWM中,index=0.866,0udcbus1對應直流母線電壓的0~100%。y=sign(x)為符號函數,定義如下:
2.3 遇限削弱積分PI控制算法
傳統數字PI調節器的增量式模型可寫為:
△u(k)=u(k)-u(k-1)=Kp[e(k)-e(k-1)]+Kie(k) (5)
式中:k為采樣次序;u(k)為k時刻PI調節器輸出;e(k)為k時刻輸入誤差信號;Kp為比例增益;Ki為積分增益,Ki=KpT/TI,T為采樣周期,Ti為積分時間常數。
為防止PI調節器積分溢出和輸出飽和,系統采用了遇限削弱積分的退飽和PI控制算法。當PI調節器進入飽和區后,不再進行積分項的累加,而執行削弱積分運算,可快速退出飽和。其具體控制算法為:e(k)=r(k)-y(k),u(k)=x(k-1)+Kpe(k),x(k)=x(k-1)+Kie(k)+KcorEpi,其中Kcor為校正增益因子,Kcor=Ki/Kp,Epi=uo-u(k),當u(k)>Umax,uo=Umax;當u(k)Umin,uo=Umin,否則uo=u(k)。
2.4 防振蕩處理
在伺服控制中,當轉子轉到給定位置時,電機轉矩還需給負載一個保持轉矩,該轉矩使電機轉子易發生振蕩,使轉子來回擺動無法快速定位。為達到快速、精確的定位功能,系統采用變PI系數的控制方法,其原理如圖1所示。當位置誤差足夠大時(區域1和5),進行快速調節,位置和速度PI調節器參數保持不變;當位置誤差足夠小時(區域2和4),為防止超調,PI調節器參數逐漸變小;當轉子進入防擺動區域時(區域3),PI調節器參數均設置為零,即保持位置不變。實驗表明,該方法能夠有效消除轉子到達預定位置時停機的振蕩現象。

基于矢量控制的PMSM伺服控制系統框圖如圖2所示。
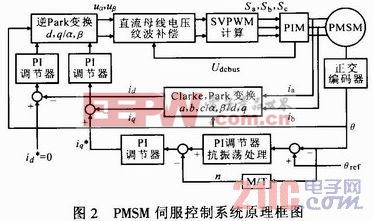
系統采用三環結構:位置環為外環,以獲得準確的位置控制;速度環為中環,實現速度跟蹤;基于id=0磁場定向控制的電流環設置為內環,以獲得快速的轉矩響應。主要控制策略包括:轉子磁場定向矢量控制、空間矢量調制、直流母線電壓紋波補償、遇限削弱積分PI控制算法及防振蕩處理等。
3 伺服控制系統軟硬件結構及其設計
3.1 系統硬件設計
基于DSP F2808的伺服控制系統硬件結構如圖3所示,主要包括F2808控制板、IGBT功率模塊和驅動電路、電壓電流檢測電路、光電編碼器位置檢測電路、LCD顯示電路、輔助電源及一臺帶增量式光電編碼器的PMSM伺服實驗電機。
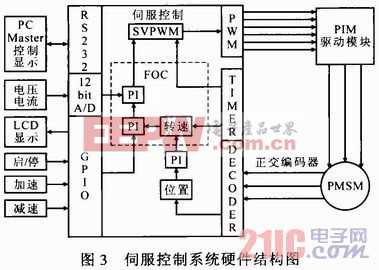
(1)F2808是一款高性價比的32位定點DSP控制器,運算速度高達100 MIPs,具有運算速度快,存儲容量大,采樣精度高,擴展能力強等特性,包含電機驅動的所有外設,無需擴展即可實現全部控制功能。在系統中,該DSP完成磁場定向矢量控制、空間矢量調制、直流母線電壓紋波補償、遇限削弱積分PI控制算法等的全部控制算法。
(2)系統采用電阻分壓法采樣檢測直流母線電壓,電機兩相輸入電流用電流霍爾LV28-NP檢測,得到的電流采樣信號經濾波處理、比例放大和電平提升后送入DSP的A/D采樣模塊。同時采樣信號通過比較電路還用作軟硬件保護信號,如欠壓、過壓、過流保護等。
(3)電機增量式光電編碼器輸出的正交脈沖信號經抗干擾處理后,送至DSP正交編碼器QEP接口。DSP通過對輸入脈沖的計數,計算出電機轉子轉速和相對轉子位置。編碼器的index信號用于初始定位和轉子位置偏差的校正。
(4)系統采用LCD顯示電機各運行狀態參數。同時通過RS232與PC連接,開發人機界面,對電機進行實時控制和狀態監控。
3.2 伺服系統軟件設計
系統在進行伺服控制時,由圖2可知,首先通過比較給定位置與編碼器實測位置得到位置誤差,該誤差經抗擾動處理后,由位置PI調節器得到一個速度給定。速度給定與實測轉速進行比較,經速度PI調節器得到轉矩電流參考。參考電流與實際電流進行比較,誤差經電流PI調節器得到電壓輸出向量。經直流母線電壓紋波補償后,通過SVPWM計算產生PWM控制信號,用以控制逆變器驅動伺服電機。
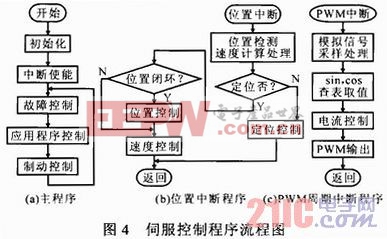
系統控制程序流程圖如圖4所示,包括主程序、位置中斷程序和PWM周期定時中斷程序。主程序主要完成DSP的初始化、故障控制、應用程序控制切換和制動控制;位置中斷程序主要包括位置/速度的檢測與計算、定位控制、位置閉環伺服控制和速度閉環控制等,中斷周期為1 ms;PWM周期中斷程序主要包括模擬信號檢測,正余弦計算,電流環控制及PWM輸出控制,中斷周期為125μs,即開關頻率為8 kHz。
4 實驗結果分析
為實現上述控制,構建了實驗裝置,系統包括一塊F2808控制板和參數檢測驅動板,一臺功率為300 W帶增量式光電編碼器(2 048線/轉)的PMSM伺服電機。在此裝置上進行電流、轉速閉環和位置閉環實驗。實驗直流母線電壓為72 V,PWM頻率8 kHz,電壓、電流的采樣周期為125μs,位置和速度的采樣周期為1 ms。
當電機穩態運行過程中,突加、突卸負載時,id,iq的電流響應波形如圖5a所示,電流變化曲線表明該系統具有快速的轉矩響應,動態性能良好。
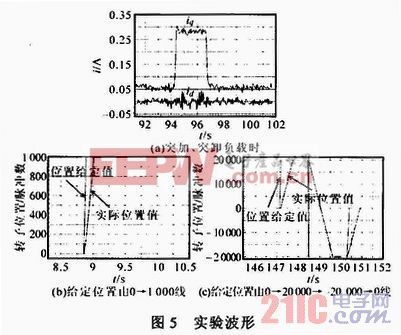
進行了兩種位置實驗:①給定位置從0線到1 000線的位置響應波形如圖5b所示;②給定位置從0線到20 000線,再到-20 000線,最后到0線的位置響應波形如圖5c所示。可見,該伺服系統可以實現快速的正反轉運行,定位精度高且轉速跟蹤響應快,且消除了定位振蕩。
5 結論
設計了一種基于DSP F2808的永磁同步電機伺服控制系統。針對工程實際,采用了直流母線電壓紋波補償、遇限削弱積分PI控制算法、防振蕩處理等控制策略,實現了數字伺服控制。實驗結果表明,該系統能夠滿足伺服控制的各項要求,并具有快速的轉矩響應,在實現位置控制和速度控制時具有較高的位置控制精度。

pwm相關文章:pwm是什么
伺服電機相關文章:伺服電機工作原理
矢量控制相關文章:矢量控制原理










評論