基于雙環控制和重復控制的逆變器控制方案研究

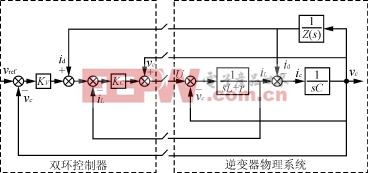
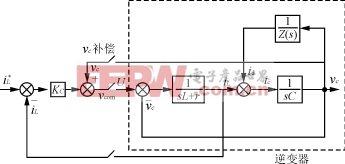
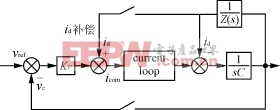
摘要:研究了一種基于雙環控制和重復控制的逆變器控制技術,該方案在電流環和瞬時電壓環之外附加了一個重復控制環。在實現輸出電壓解耦和擾動電流補償后,根據無差拍原理設計的雙環控制器使逆變器達到了很快的動態響應速度;位于外層的重復控制器則提高了穩態精度。該方案在一臺基于DSPTMS320F240控制系統的PWM逆變器上得到驗證。 關鍵詞:逆變器;雙環;無差拍;重復控制 0 引言 隨著閉環調節PWM逆變器在中小功率場合中的大量使用,對其輸出電壓波形的要求也越來越高。高質量的輸出波形不僅要求穩態精度高而且要求動態響應快。 傳統的單閉環系統無法充分利用系統的狀態信息,因此,將輸出反饋改為狀態反饋,在狀態空間上通過合理選擇反饋增益矩陣來改變逆變器一對太接近s域虛軸的極點,增加其阻尼,能達到較好的動態效果。單閉環在抵抗負載擾動方面與直流電機類似,只有當負載擾動的影響最終在輸出端表現出來以后,才能出現相應的誤差信號激勵調節器,增設一個電流環限制啟動電流和構成電流隨動系統也可以大大加快抵御擾動的動態過程。瞬時值反饋采取提高系統動態響應的方法消除跟蹤誤差,但靜態特性不佳,而基于周期的控制是通過對誤差的周期性補償,實現穩態無靜差的效果,它主要分為重復控制和諧波反饋控制。 本文提出了一種基于雙環控制和重復控制的逆變器控制方案,兼顧逆變器動靜態效應,另外使用狀態觀測器提高數字控制系統性能。 1 逆變器數學模型 單相半橋逆變器如圖1所示,L是輸出濾波電感,C是輸出濾波電容,負載任意,r是輸出電感等效電阻和死區等各種阻尼因素的綜和。U是逆變橋輸出的PWM電壓。 圖1 單相半橋逆變器 選擇電感電流iL和電容電壓vc作為狀態變量,id看作擾動輸入,得到半橋逆變器的連續狀態平均空間模型為 式中:x= A= 根據式(1),很容易得到逆變器在頻域下的方框圖,如圖2所示。PWM逆變器的動態模型和直流電機相似,轉速伺服系統的設計方法在這里也適用。本文借鑒直流電機雙環控制技術,并改造成為多環控制系統,在逆變器波形控制上取得了很好的效果。 圖2 逆變器框圖 2 控制方案分析 本控制方案包括雙環控制系統和位居外層的重復控制系統。在瞬時波形控制場合,控制算法的執行時間和A/D轉換延時相對于采樣周期通常不可忽略,有必要采用狀態觀測器,利用其預測功能將控制算法提前一拍進行。本方案采用無差拍觀測器對輸出電壓和電感電流進行預測。 2.1 雙環控制 雙環控制系統框圖如圖3所示,Z(s)是未知的負載。需要檢測和反饋的信號有三個,即電感電流iL,輸出電壓vc,負載電流id。電感電流檢測為電流環而設。與直流電機相似,檢測輸出電壓不僅用于電壓瞬時波形控制而且實現輸出電壓解耦,消除輸出電壓對電流環的擾動,減輕電流環控制器的負擔。同樣,負載電流對瞬時電壓環來說也是一個外部擾動,補償負載電流能有效抑制其對輸出波形的影響,提高穩態精度。正是由于對負載電流進行了補償,電流環無須對負載電流的擾動進行抑制,所以,本方案沒有反饋電容電流,而將擾動包含在反饋環路的前向通道內。若采用電容電流反饋,要得到良好的擾動抑制效果,必將導致電流環的增益過大。這不僅對穩定性不利,而且造成超調增大,電流跟蹤的快速性受影響。 圖3 雙環系統控制框圖 模擬控制系統的閉環極點離虛軸越遠則動態響應越快,但無法將其配置到s平面的負無窮處,而s平面的負無窮被映射到z平面原點,若將數字控制系統的閉環極點全部配置到平面原點,則可以達到極快的動態響應速度,這就是所謂的無差拍技術。 由于本方案實現了輸出電壓解耦和負載電流補償,電流環和電壓環的結構大大簡化,控制器的設計可以簡單到僅僅采用P環節。這里采用無差拍原理確定電流環控制器KC和瞬時電壓環控制器KV。 2.1.1 電流環設計 圖4(a)所示為電流環框圖,為了實現輸出電壓交叉反饋解耦,控制算法由式(2)給出。 vcom(k)=KC〔iL*(k)-iL(k)〕+vc(k)(2) 式中:iL*是電感電流指令; vcom是電流環計算出的控制量。 圖4(b)是解耦后簡化的電流環框圖,ZOH是零階保持器。采用零階保持器法將控制對象離散化。 Gc(z)=Z 式中:T是采樣周期; a=r/L。 (a)電流環框圖 (b)解耦后簡化的電流環 圖4電流環設計 閉環系統的特征方程是 Z- 根據無差拍原理,將其特征根全部配置在原點,于是有 2.1.2 瞬時電壓環設計 由于電流環的截止頻率高于瞬時電壓環,對電流指令的跟蹤速度要遠快于瞬時電壓環對波形的跟蹤,在設計瞬時電壓環時可認為內環是一個常數增益環節。圖5(a)是瞬時電壓環框圖。對負載電流進行補償后,相應的控制算法由式(6)給出。 (a)瞬時電壓環框圖 (b)補償后簡化的電壓環 圖5 電壓環設計 
![]() (1)
(1)![]() ;u=
;u=![]() ;y=
;y=![]() ;
; ;B=
;B= ;C=[0 1]。
;C=[0 1]。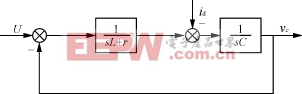
![]() =
=![]() (3)
(3)

![]() =0(4)
=0(4)![]() (5)
(5)












評論