交流傳動電力機車直接轉矩控制策略實現

3.2 使用雙DSP控制器的硬件實驗分析
在仿真基礎上,進行了小功率異步電機的硬件實驗。硬件實驗平臺采用異步電動機拖動他勵直流發電機帶電阻負載,通過改變他勵發電機勵磁電壓,調節負載,控制器采用雙DSP芯片系統TMS320VC33+TMS320LF2407A,2407主要采集轉速和電壓、電流然后通過握手協議向VC33傳送采集的數據以及向IGBT驅動發送脈沖的外圍工作,而VC33是150 MHz的浮點運算芯片,主要接收2407傳輸的采集數據,然后進行控制策略和PWM策略計算,最后向2407發送控制命令及改變PWM脈沖信息等。系統開關頻率1 kHz,采樣頻率10 kHz,利用板載D/A模塊,將定子電壓、電流、定子磁鏈波形分別進行顯示。
圖6示出圓形磁鏈軌跡及其對應的定子線電壓和相電流,可見定子磁鏈保持了較好的圓度,定子相電壓也保持對稱,未出現較多毛刺,由于磁鏈圓度較好,相電流保持了較好的正弦性,由于采樣率不是很高,電流內部有較多毛刺,不是很平滑。本文引用地址:http://www.j9360.com/article/159581.htm
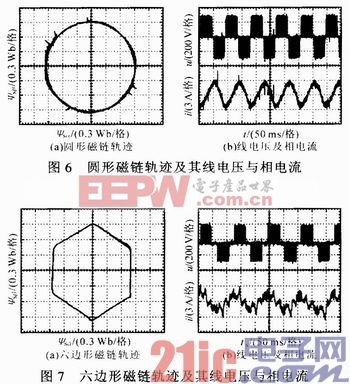
圖7示出正六邊形磁鏈軌跡及其對應的定子線電壓和相電流,可見定子磁鏈在高速時保持了較好的對稱度,定子相電壓也保持對稱,沒有出現較多毛刺,但由于定子磁鏈不再保持圓形,正如仿真分析所得結果,使得定子電流正弦度變差,但可通過折角處理得以改善,此處不贅述。
4 結論
以電力牽引直接轉矩控制為研究對象,提出在電機低速區域采用異步空間矢量調制直接轉矩控制,它采用預測控制的思想,利用當前定子磁鏈與預期定子磁鏈的誤差構成微分量,生成參考電壓矢量,完成對電機的閉環控制,同時在高速區采用直接自控制代替分段同步調制,避免了復雜的同步調制運算,并且利用一個開關頻率反饋控制環完成了開關頻率的固定,最后利用數字化交流傳動實驗平臺對所提理論進行了實驗驗證,實驗結果驗證了此處所提出策略的正確性。

pid控制器相關文章:pid控制器原理
矢量控制相關文章:矢量控制原理









評論