自適應模糊PID控制的太陽光跟蹤伺服系統

摘要:針對太陽光跟蹤伺服系統中應用的傳統PID控制過程中的一些問題,本文通過對自適應模糊PID控制系統的分析,設計了雙軸跟蹤伺服系統自適應模糊PID控制器,并在Simulink環境中建立方位角跟蹤傳動機構仿真模型且完成仿真。仿真結果表明,太陽光跟蹤伺服系統自適應模糊PID控制器較傳統PID控制器具有較強的穩定性、適應性與魯棒性,這在太陽光跟蹤伺服系統控制領域具有重要的實用價值與應用空間。
關鍵詞:自適應模糊PID控制器;PID控制器;太陽光跟蹤伺服系統;Simulink仿真
太陽能以其不竭性和環保優勢已成為當今國內外最具有發展前景的新能源之一。光伏(PV)發電技術在國外已得到深入研究和推廣,我國在技術上也已基本成熟,并進入推廣應用階段。高效采集太陽能作為太陽能光伏發電的關鍵技術之一,目前較多利用的是太陽能光感跟蹤方法。按照跟蹤自由度的多少,太陽能跟蹤伺服系統可分為兩類:單軸和雙軸。因雙軸跟蹤精度優于單軸,現已被普遍采用。
文中以基于步進電機的雙軸跟蹤伺服系統為研究對象,在文獻中提出的傳統PID控制器基礎上,結合模糊控制理論,設計出自適應模糊PID控制器,并在Simulink環境中建立方位角跟蹤傳動機構仿真模型且完成仿真。
1 自適應模糊PID控制策略分析
在工業生產過程中,由于操作者經驗不易精確描述,控制過程中各種信號量及評價指標不易定量表示,傳統PID方法受到局限。運用模糊數學的基本理論和方法,把規則的條件、操作用模糊集表示,并把這些模糊規則及有關信息作為知識存入計算機知識庫,然后計算機根據控制系統的實際響應情況,運用模糊推理即可自動實現對PID參數的最佳調整,以此實現自適應模糊PID控制。
PID控制器由比例系數(KP)、積分系數(KI)和微分系數(KD)組成,其實質就是根據輸入的偏差值按比例、積分、微分函數關系進行運算,運算結果用于控制輸出,包括測量、比較和執行3個部分。PID是一種有效而簡單的控制器,能夠在保證基本不影響系統穩定精度的前提下提高系統的相對穩定性,很好地改善系統的動態性能。基本控制規律可描述為:![]()
模糊控制實質上是一種非線性控制,屬于智能控制的范疇。它是在控制方法上應用模糊集理論、模糊語言變量及模糊邏輯推理的知識來模擬人的模糊思維方法,用計算機實現與操作者相同的控制。模糊控制器的基本結構包括知識庫、模糊推理、輸入量模糊化、輸出量精確化四部分。模糊控制系統的魯棒性強,干擾和參數變化對控制效果的影響被大大減弱,尤其適合于非線性、時變及純滯后系統的控制。
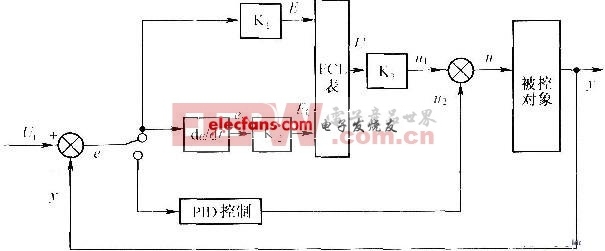
結合PID與模糊控制兩種算法的特征與優勢,自適應模糊PID典型控制系統主要包括參數可調PID和模糊控制系統兩部分組成,其系統結構如圖1所示。

PID控制部分實現對系統的控制,自適應模糊控制部分以誤差和誤差變化率作為輸入。它根據不同時刻的輸入,利用模糊控制規則在線對PID參數KP、KI和KD進行修改,以滿足控制器參數的不同要求,使被控對象具有良好的動態與靜態性能,從而提高對被控對象的控制效果。





評論