基于自適應模糊PID控制的太陽光跟蹤伺服系統

摘要:針對太陽光跟蹤伺服系統中傳統PID控制過程中的一些問題,通過對自適應模糊PID控制系統的分析,設計了一種雙軸跟蹤伺服系統自適應模糊PID控制器,同時在Simulink環境中建立了方位角跟蹤傳動機構仿真模型并完成了仿真。仿真結果表明,太陽光跟蹤伺服系統自適應模糊PID控制器較傳統PID控制器具有較強的穩定性、適應性與魯棒性,在太陽光跟蹤伺服系統控制領域具有重要的實用價值與應用空間。
關鍵詞:自適應;模糊PID控制器;太陽光;跟蹤伺服系統;Simulink仿真
0 引言
太陽能以其不竭性和環保優勢已成為當今國內外最具有發展前景的新能源之一。高效采集太陽能是太陽能光伏發電的關鍵技術之一,本文以其廣泛利用的基于步進電機的雙軸跟蹤伺服系統為研究對象,在傳統PID控制器的基礎上,結合模糊控制理論,設計一種自適應模糊PID控制器,并在Simulink環境中建立了方位角跟蹤傳動機構仿真模型并完成了仿真。
1 自適應模糊PID控制策略分析
在工業生產過程中,由于操作者經驗不易精確描述,傳統PID方法受到局限。運用模糊數學的基本理論和方法,把規則的條件、操作用模糊集表示,從而運用模糊推理即可自動實現對PID參數的最佳調整,并以此實現自適應模糊PID控制。
PID控制器能夠在保證基本不影響系統穩定精度的前提下提高系統的相對穩定性,從而很好地改善系統的動態性能。其基本控制規律可描述為:
![]()
模糊控制實質上是一種非線性控制。模糊控制系統的魯棒性強,干擾和參數變化對控制效果的影響被大大減弱,尤其適合于非線性、時變及純滯后系統的控制。
結合PID與模糊控制兩種算法的特征與優勢,自適應模糊PID典型控制系統主要包括參數可調PID和模糊控制系統兩部分,其中PID控制部分實現對系統的控制,自適應模糊控制部分以誤差e和誤差變化率作輸入。它根據不同時刻的輸入,利用模糊控制規則在線對PID參數KP、KI和KD進行修改,以滿足控制器參數的不同要求,使被控對象具有良好的動態與靜態性能,從而提高對被控對象的控制效果。
2 被控對象模型
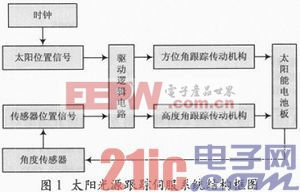
目前,關于太陽能的伺服系統模型大多是對直流電機建模,并沒有考慮到系統參數對跟蹤系統的影響。本文采用的被控對象為基于步進電機的雙軸跟蹤伺服系統,其基本功能是使光伏陣列快速、平穩且準確地跟蹤定位太陽光源。利用天文知識可以精確地獲得太陽高度角和方位角。太陽光源跟蹤伺服系統時刻檢測光伏陣列和太陽光源的位置并將其輸入到驅動運算單元,同時產生輸出信號驅動兩部電機,分別在水平面和鉛垂面內運動,使太陽光時刻垂直入射到光伏陣列的表面上,從而達到準確和快速跟蹤太陽光源的目的。圖1所示是太陽能光源跟蹤伺服系統的結構框圖。
由于高度角跟蹤傳動機構與方位角傳動機構工作時互不影響,下面以方位角跟蹤傳動機構為例進行建模和仿真研究。由文獻可知,方位角跟蹤傳動機構的傳遞函數為:
![]()
3 自適應模糊PID控制器的設計
本控制系統設計的關鍵是要先找出三個參數與誤差e和誤差變化率之間的模糊關系,要求在系統運行中不斷檢測e和誤差變化率,根據模糊控制原理對三個參數進行在線修正以滿足不同情況下對參數的不同要求,最終獲得良好的動態和靜態控制性能。
3.1 確定模糊控制器的結構
基于對系統的上述分析,模糊控制器采用兩輸入、三輸出的控制器,將誤差e和誤差的變化率作為輸入,將PID控制器的三個參數的修正值作為輸出。其KP,KI,KD參數調整的算式如下:
式中,![]() 分別是參數前值;△KP,△KI,△KD分別為參數修正值。
分別是參數前值;△KP,△KI,△KD分別為參數修正值。








評論