基于GSM雙音多頻信號控制的小車設計


PIC微控制器向步進電機驅動電路按順序輸入“0101”→“1001”→“1010”→“0110”序列,使電機進行順時針轉動,按順序輸入“01 01”→“0110”→“1010”→“1001”序列時,電機進行逆時針轉動。PIC微控制器需合理分配和設置所需端口。PIC單片機的PORTD端口作為DTMF(Q3~Q4)數據輸入端口,PORTC端口連接串口RS-232,PORTB端口連接步進電機。
2 系統性能測試
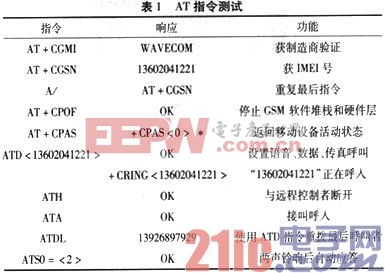
測試分3個階段進行。第一階段,對GSM調制解調器進行響應測試,以確保正確的響應。當接收到GSM信號呼入時,通過AT指令可進行回應,一系列響應如表1所示。第二階段,以固定序列驅動步進電機,以確保正確的電機轉向。第三階段是系統聯調,使用終端按鍵產生雙音多頻GSM信號,小車接收GSM信號呼入后按相應的驅動序列進行移動。實驗表明,小車能按要求行駛,實現可靠的遠程控制。
3 結束語
雙音多頻信令具有良好的傳輸速度,使其廣泛應用于各種通信和控制系統中。項目設計了基于GSM網絡雙音多頻信號控制的小車。只要在GSM網絡范圍內,能夠準確、實時地遠程控制小車,可以取代一些特殊和危險環境作業的人工操作。












評論