基于廣義預測的蒸氨槽氨壓控制系統研究

4系統仿真與分析
用MATLAB軟件實現最小二乘法參數辨識,并帶入實際記錄數據,可得到蒸氨槽氨壓控制對象的傳遞函數為[5]。
基于MATLAB為平臺,通過simulink和M文件函數編程對得到的氨壓控制系統模型進行PID和廣義預測控制進行仿真,對比分析。其中PID參數經過整定后為:
廣義預測控制算法仿真參數調試后為:柔化系數
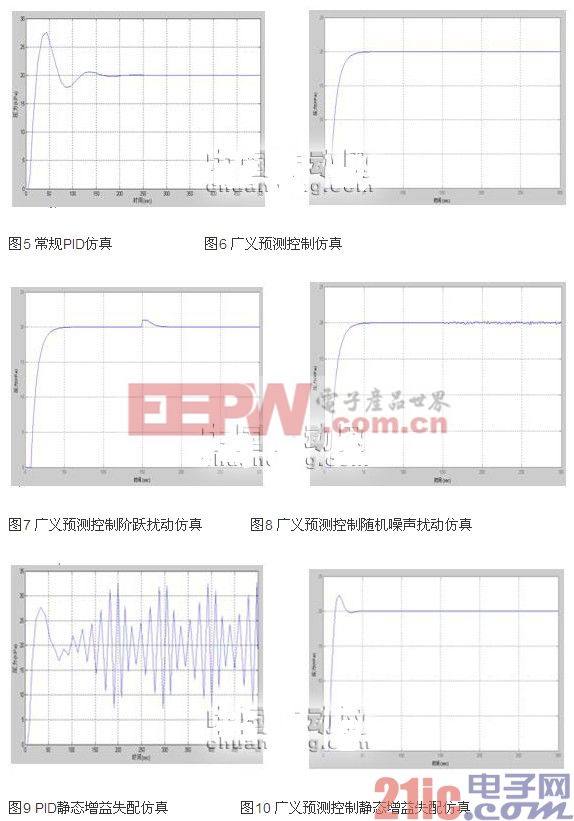
圖5和圖6比較,在無干擾標準情況下,PID控制系統超調量較大,動態響應進入穩態時間較長約為250s左右,而廣義預測控制系統的響應速度很快,幾乎沒有超調量,調節時間在50s以內,其控制性能明顯優于PID控制器,很好地滿足蒸氨槽氨壓控制系統的控制精度和控制要求。
圖7和圖8分別在150s的時間加入了階躍信號擾動和隨機白噪聲干擾,從仿真結果可知廣義預測控制具有自適應作用,能夠消除一定范圍外界內干擾情況對控制系統的影響,使誤差較快地逼近0,達到系統穩定狀態。
圖10顯示當模型不匹配靜態增益失配時,廣義預測控制器的輸出性能變化很小,總體來說,廣義預測控制算法具有很強的抗擾性能和魯棒性,完全適用于鐵紅蒸氨槽氨壓控制。
5結論
在確定鐵紅蒸氨槽氨壓控制系統的模型參數,通過選擇合適的參數基礎上,分別采用PID控制器、廣義預測控制器對蒸氨槽氨壓控制系統的對象模型進行仿真,通過分析比較得出廣義預測控制器的不僅對于干擾信號具有很好的抑制作用,而且能在模型失配的情況下快速響應,達到系統穩定狀態,具有良好的控制效果以及自適應性和魯棒性。
參考文獻:
王坤.蒸氨裝置的改造及運行情況分析[J].河南化工,2005,22(4):46-47.
左愛武.一種用于蒸氨生產的智能控制系統[D].武漢科技大學,2007
張嘉英,王文蘭.鍋爐水位控制系統的串級廣義預測控制[J].電力自動化設備,2010,30(11):75-77.
符小琳.一種隱式廣義預測自校正控制算法研究及仿真[J].工業儀表與自動化裝置,2011,24(2):7-8.
李國勇.智能預測控制及其MATLAB實現[M].北京:電子出版社,2010.本文引用地址:http://www.j9360.com/article/159353.htm

陀螺儀相關文章:陀螺儀原理










評論