基于廣義預測的蒸氨槽氨壓控制系統研究

2.4管道模型
忽略氣體傳輸過程中管道損耗,由于輸送管道很長,加上原料氨水反應及氨氣蒸出過程的影響,管道內的氣體傳輸過程必然造成嚴重的純滯后。為便于分析,管道模型可以用
2.5蒸氨槽氨壓系統模型
由前面各個單元建立模型,推導蒸氨槽氨壓系統模型:

其中,
令
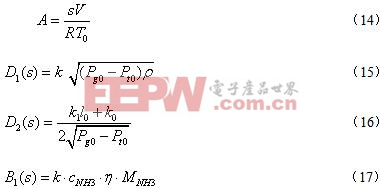
由上述公式推導得到蒸氨槽氨壓控制系統數學模型為:
引入系統管道模型即延時環節得到:

由上式可知蒸氨槽氨壓主要由供料泵的轉速控制,出口調節閥閥門開度及出口端壓力在一定范圍條件下不變,得到轉速對蒸氨槽氨壓的傳遞函數為形如一階慣性加純滯后環節:
慣性時間常數T:被控對象在缺乏控制器調節的情況下,從接受外界輸入時間開始,系統輸出自行到達新的穩態值所需要的時間。它表征了被控對象動態響應的特性,如果時間常數
滯后時間
廣義對象比例放大系數
3蒸氨槽氨壓廣義預測控制
由前面對蒸氨槽氨壓控制過程特性的分析,被控對象為一階慣性加純滯后環節,由于蒸氨過程中外界環境干擾參數變化導致模型失配,常規控制算法顯然對蒸氨過程控制效果不佳。
針對鐵紅蒸氨過程控制中被控對象具有時滯性,并且依賴控制過程的精確數學模型特點,選擇對于模型依賴程度較低、具有自適應能力以及魯棒性較強的預測控制算法GPC。在鐵紅蒸氨槽氨壓控制系統中,利用廣義預測控制的多步預測及控制時域補償時滯,判斷未來的控制作用趨勢,通過滾動優化作用求取當前最佳的控制作用即。同時由于具有模型在線辨識與反饋校正功能,對于參數變化及環境干擾模型失配等具有較強的自適應能力,因此鐵紅蒸氨槽氨壓系統設計靈活方便,具有良好的控制性能和魯棒性[3]。
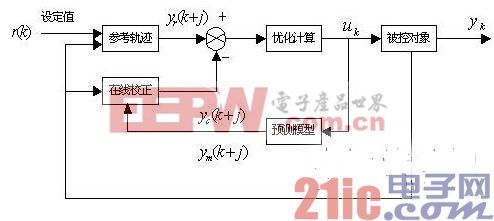
圖4 蒸氨槽氨壓廣義預測控制系統結構圖
3.1預測模型
假設被控對象基于階躍響應的預測模型向量為
3.2滾動優化
式(21)可寫成向量形式:
考慮不希望控制增量變化過于劇烈,因此,k時刻的優化性能指標的向量形式可取為:

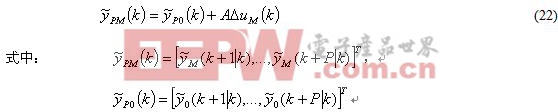
將式(3)代入式(4),并通過極值必要條件dJ(k)/dΔuM=0可求得
3.3反饋校正
當k時刻把控制量u(k)施加于對象時,利用預測模型(2)可算出未來時刻的輸出預測值
式中:
 本文引用地址:http://www.j9360.com/article/159353.htm
本文引用地址:http://www.j9360.com/article/159353.htm

陀螺儀相關文章:陀螺儀原理










評論