一種可變形飛行器的無人機控制系統設計與實驗

摘要:飛控系統是無人機的核心,無人機的外部架構對其性能的影響也很重要。為了提高無人機系統性能,給出一種無人機控制系統設計并進行了實驗。文章在介紹變形飛行器和飛控系統功能要求的基礎上,給出了基于芯片LPC2148的硬件設計,介紹了各個硬件部分的功能、軟件架構和控制規律的選擇與設計,詳細介紹了實驗的準備工作和實際飛行情況,給出了軟件調試流程圖,分析了調試結果。經過多次飛行試驗,表明系統的設計是適合實驗中的可變形飛行器的,并且合理可靠,能夠完成預期的飛行任務,具有較好的實用性。
關鍵詞:變形飛行器;飛控系統;無人機;地面控制站;實驗
0 引言
無人駕駛飛行器簡稱無人機(UAV),是一種由動力驅動、無人駕駛和可重復使用的航空器。無人機因其成本低、效率好、應用靈活、危險系數小等優點而廣泛應用于偵查、目標指示、生化武器探測、電子干擾、航空攝影、水災監視等軍事和民用領域。
隨著國家現代化和國防事業的發展,單一飛行模式的飛行器(運輸機、戰斗機、旋翼機、火箭、導彈、無人機、飛艇、空天往返飛機等)已經難以滿足不斷增長的需求。新一代空天飛行器從地面或運載平臺上起飛,可以穿越大氣層飛行,執行各種任務使命,其飛行環境(高度、飛行馬赫數等)變化很大。固定外形的飛行器很難適應如此廣泛的環境參數變化,保持優良的性能。為了適應更加寬廣的飛行空域和速度范圍變化,需要發展一種能隨著外界飛行環境自適應地改變飛行器外形、始終保持優良飛行性能的“智能變形飛行器”。
無人機控制系統的核心部件為機載飛控系統和地面控制站。飛控系統實現對無人機的自主飛行控制;地面控制站實現對無人機遙控,航跡規劃,改變飛行計劃,通信聯絡等任務。地面站同時完成接收、處理、發送信息的任務。
1 飛控系統功能要求
保持無人機按照預定飛行計劃飛行,并且能根據地面指令及時調整姿態和飛行;對擾動具有抗干擾性,能及時從擾動中調整和恢復正常飛行;并且具有較小的體積和重量,保證無人機的飛行效率和足夠的飛行時間。對飛控系統的具體要求為:能完成飛行控制信號輸出,控制升降舵機、方向舵機、發動機油門舵機和副翼舵機;對當前飛行狀態信息的采集,包括航向、姿態、高度、速度;通過串口接受GPS信息;地面控制站和飛控系統通過數傳電臺進行數據傳輸;能夠在遙控飛行和自主飛行間切換。
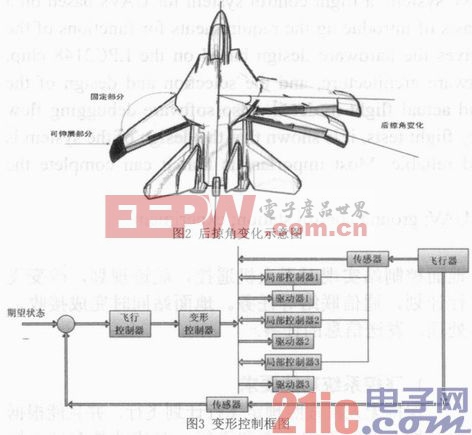
2 變形飛行器機構和變形控制
飛行控制器根據飛行任務和飛行條件的要求,確定副翼變形頻率,使變形速度既滿足任務需求,又對飛行產生的不利影響最小,而變形過程中機翼的轉動會對飛行器的氣動力產生影響,氣動布局的改變使其穩定特性受到影響。所以合理選擇變形飛行器,變形控制算法的設計和布置內部硬件顯得尤為重要。
本設計采用的變形飛行器結構為仿F-14模型,如圖1。
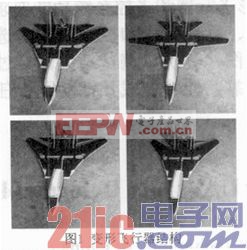
該模型特點如下:一是機翼結構為后掠角可變,二是全動尾翼結構,機體橫側向滾轉靈活。
3 機載飛控系統結構圖總體設計
我們采用開源網站開發設計的機載飛控系統飛控板,系統設計如圖4所示。
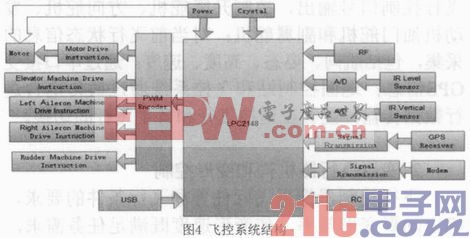
3.1 系統芯片介紹
LPC2148是基于一個支持實時仿真和嵌入式跟蹤的32位ARM7 TDMI-S CPU的微控制器,并帶有32kB和512kB嵌入的高速flash存儲器。該芯片可以配置GPS、紅外傳感器等外部設備來達到我們預期的飛行目的。

dc相關文章:dc是什么




評論