智能車賽道記憶算法的研究
——

本次“飛思卡爾”智能車邀請賽規則中明確指出,智能車在賽道上連續跑兩圈,并記其中最好圈成績為比賽成績。這個規則的確立使得賽道記憶算法成為了可行。
本文引用地址:http://www.j9360.com/article/15778.htm如圖1所示,賽道記憶算法在第一圈以最安全的速度緩慢駛過一圈,并將賽道信息保存下來,第二圈根據保存下來的信息進行車速和轉角決策的相應最優化,從而在第二圈取得好成績。無論智能車的傳感器前瞻距離有多遠,在跑圈時它都只能預測在一段有限距離內賽道的情況。而采用賽道記憶算法的智能車,在第二圈時已對整個賽道有了全面的認識,從而在相同條件下,將比不使用賽道記憶的智能車更具優勢。
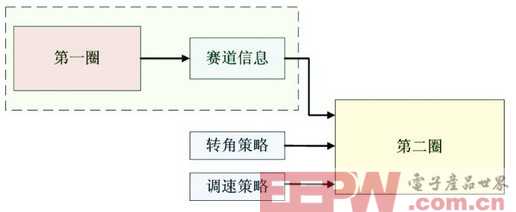
圖1 賽道記憶算法
算法實現前提
要想成功實現賽道記憶算法,必須有以下幾大前提:
1.賽車在第一圈必須安全走完全程。在第一圈,賽車的最主要目的是采集賽道信息,使用賽道記憶算法的智能車,在第一圈一般都會采用較緩慢的勻速走完全程。
2.賽車必須能明確分辨出賽道起點線和十字交叉線的區別。
3.賽車必須能夠有足夠記錄一圈賽道數據的內存空間。由于單片機芯片的Ram容量有限,算法研究者需要對算法進行優化處理,改變保存的格式以節省內存空間。



















評論