基于DSP和CAN總線的RTU的設計

摘要:介紹了基于DSP 和CAN 現場總線的分布式新型變電站RTU 的設計方案。該RTU 分為通信主控模塊和信號測控模塊, 介紹了這兩個模塊的設計方法及CPLD 技術在這兩個模塊設計中的應用。在設計RTU 軟件時,采用了模塊化的程序設計方法。
本文引用地址:http://www.j9360.com/article/156549.htm遠程測控終端(RTU) 作為體現“ 測控分散、管理集中” 思路的產品從20 世紀80 年代起介紹到中國并迅速得到廣泛應用, 應用在變電站上的RTU 主要是實現現場電力參數的遠程采集與控制命令的遠程發布, 并將信息或結果組裝成報文, 上送到控制中心或調度端。縱觀國內外的RTU 產品, 逐步從集中式控制結構向模塊化、分散式、開放性的系統控制結構發展。由于變電站的數據量和信息量大, 實時性要求高, 因此將具有強大、高效的運算能力和豐富外圍接口電路的DSP 應用于RTU 的設計方案; 同時引入了開放性結構的CAN 現場總線引入, 運用于變電站現場數據的通信并由它組成了一個開放、可靠和實時的監控系統。
1 系統總體結構設計
RTU 系統采用以DSP 為微處理器、CAN 為現場通信總線的分布式模塊化結構。由于分布式模塊化結構易于實現功能分解, 能根據需要進行集中組拼和分散安裝,因而系統具有很好的靈活性。系統結構如圖1 所示。
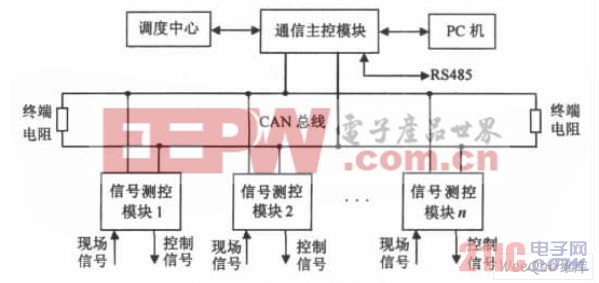
圖1 系統結構
RTU 可以分為通信主控模塊和信號測控模塊。CAN總線實現現場數據的通信。信號測控模塊一方面監測遠方變電站斷路器( 開關) 位置、刀閘位置、有載調壓變壓器分接頭的位置、事故變位信號、告警信號等( 遙信) ,同時監測主變、線路的有功功率、無功功率、電壓、電流、功率因數、有功電度、無功電度、主頻等( 遙測) 并轉換成相應的電參量; 另一方面把上位機或調度中心下達的命令通過信號測控模塊的控制信號輸出端口用以控制斷路器的分、合位置, 有載調壓變壓器的分接頭位置( 遙控和遙調) 。
考慮到RTU 的通用性和靈活性, 通信主控模塊設有多種通信端口模式:
(1)CAN 總線, 與下位信號測控模塊相連實現數據的請求與命令發布;(2)RS232 端口, 實現與PC 的通信, 將RTU 處理后的數據交與PC 機作進一步處理或由PC 機實現遠程操作與控制;(3) 遠方通信端口, 用來與遠程控制中心進行通信;(4)RS485 端口, 用來實現與傳統的RTU 設備或其他下位智能儀表接口相兼容。
2 通信主控模塊的硬件電路設計
采用內置CAN 控制器的TMS320LF2407A ( 簡稱LF2407A) 作為通信主控模塊的處理核心, 用ALTERA 公司的MAX7000S 系列的EPM7128STC100-7 CPLD 集成了處理器外圍數字電路, 系統結構圖如圖2 所示。從功能上通信主控模塊分為三個部分:CAN 總線接口部分; 并串轉換部分; 鍵盤顯示部分和掉電數據保存部分。
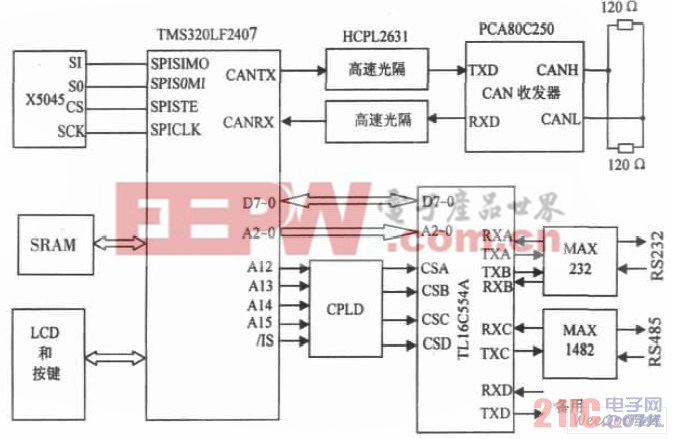
圖2 系統結構圖










評論