基于機器視覺的物體包裝盒實時貼標系統設計

3 系統硬件平臺
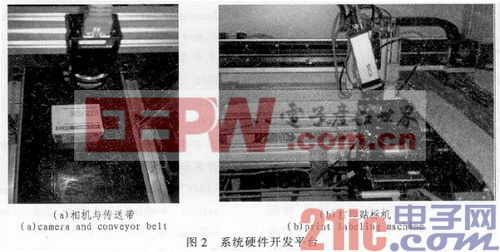
貼標系統硬件平臺主要由光電傳感器、工業相機、傳送帶、工業PC、開關電源、打印貼標模塊和檢測模塊等組成,系統硬件開發平臺如圖2所示。光電傳感器主要用來給出一個3.3~12 V高電平信號觸發工業相機進行目標物圖像的實時獲取;MV-VEM系列千兆網絡相機采用幀曝CCD作為傳感器,能輸出高質量,顏色還原性好的圖像,并以網絡作為輸出,將獲取到的圖像數據輸送至工業PC;打印貼標模塊主要由打印機和貼標機兩部分組成,打印機主要用來打印特定標簽,貼標機負責將標簽貼在目標物指定位置;檢測模塊用來最終檢測貼好的標簽是否符合要求以及掃描出相應標簽的條形碼或者二維碼。工業PC是該貼標系統的核心,用來實現系統中指令的發送、數據的采集與處理和測試結果的顯示等。本文引用地址:http://www.j9360.com/article/153487.htm
4 系統軟件設計
該貼標系統的軟件采用MFC和OpenCV編程。OpenCV(Open Source Computer Vision Library)是由Intel公司資助的開源計算機視覺庫。它由一系列C函數和少量CH類所組成,實現圖像處理和計算機視覺方面的很多通用算法,例如特征檢測與跟蹤、運動分析、目標分割與識別以及3D重建等,是近年來比較流行的圖像處理數據庫。系統軟件設計的結構圖如圖3所示。
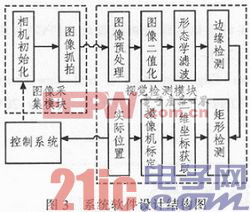
在軟件設計中,圖像采集模塊主要是采用西安維視公司生產的MV-VEM120C型號的千兆網絡工業相機,該相機具有高分辨率、高精度、高清晰度、色彩還原性好、低噪聲等優點,能夠滿足工業級圖像處理要求,通過調用該相機的API,實現對目標物圖像數據的采集。視覺檢測模塊主要用來對獲取到的圖像信息進行實時處理,處理流程主要有以下幾步:首先通過圖像灰度化、圖像分割等一系列圖像預處理,生成二值圖像。然后利用形態學處理去除二值圖像噪聲。






評論