基于雙計算機的仿人機器人的視覺跟蹤系統

主程序模塊與一般的Linux應用程序沒有區別,它主要有以下幾個功能:與信息處理系統通訊;向實時任務傳送控制參數;實現人機交互,即將從實時任務傳過來的電機轉動數據和傳感器數據輸出到監視器上,同時將通過鍵盤輸入的控制信號,實際上主程序模塊主要實現控制臺的作用,可以稱之為控制臺程序。
3.3運動控制過程
跟蹤系統的控制目標是:根據圖像處理獲取的目標質心在圖像平面中的位置,實時調整機器人頭部的2個電機轉動角度,將目標置于圖像平面的中央位置。運動控制系統中一個控制循環大約需要3毫秒的時間。在信息處理系統中,處理一幀圖像平均需要100毫秒左右的時間。由此可見,視覺處理的周期要遠遠大于運動控制的周期。因此在一個視覺處理周期之后,系統應該做好下一個視覺處理周期之內的運動規劃,也就是做好后面多個控制周期之內的運動規劃,這樣才能保證機器人的頭部以均勻、平緩,同時又是準確的速度來跟蹤目標。
4 實驗
在仿人機器人BHR1中,信息處理計算機的CPU為PⅣ2.4GHz,內存為512MB,運動控制計算機的CPU為PIII700MHz,內存為256MB。SVS系統的采集速度為15幀每秒,采集圖像的大小為320×240像素。Memolink采用PCI接口,最大傳輸速率為1M bytes/s或1M words/s。
4.1 復雜背景下運動目標的跟蹤。
在運動物體跟蹤實驗中,紅色小球作為目標在機器人的視野中做單擺運動。為了驗證基于多圖像信息的目標識別算法,背景中放置了紅色的方塊和一個綠色的小球。實驗結果如圖5所示,第一行圖像是實驗場景,第二行圖像是左攝像頭的視頻序列,結果表明彩色目標運動速度小于0.3m/s時,機器人頭部仍可以很好地跟蹤目標的運動,并使其始終位于左側攝像機所采集到圖像的中央位置。在復雜的非結構環境的室內背景下,利用單一的圖像信息,系統很可能會跟蹤失敗。相同背景下,單一的顏色信息不能將紅色的小球和背景中的紅色方塊區分開來。
圖 5 復雜背景下彩色目標跟蹤實驗
圖6顯示了紅色小球運動狀態時的跟蹤過程,圖中的數據為實際數據的1/10抽樣。可以看出,在X軸方向上,目標質心坐標到圖像中心的偏差在±30個像素以內,在y軸方向上,目標質心坐標到圖像中心的偏差在±20個像素內。實驗說明在物體的運動過程中,跟蹤系統能夠實時跟蹤物體并將物體的質心保持在左眼攝像機的中心。
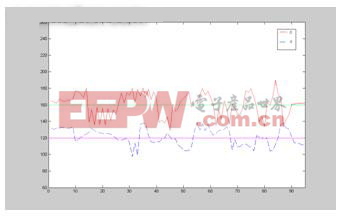
圖6 目標在X、Y方向上的跟蹤誤差(像素)
5 結論
本文提出了基于Memolink通訊的雙計算機的仿人機器人的視覺跟蹤系統,系統能夠滿足仿人機器人實時視覺跟蹤的性能要求。
在未知的復雜環境中,基于深度、顏色和模版匹配的多圖像信息融合方案確保機器人穩定的從視頻序列中分割出運動目標。
本文作者的創新點
本文提出并實現了一種基于MemoLink通訊的雙計算機的視覺跟蹤系統, 一臺計算機負責視頻信息的處理,另一臺計算機負責機器人頭部的運動控制,實現了仿人機器人頭部對運動目標的實時跟蹤。本文提出了一種集成深度、顏色和形狀信息的逐步逼近目標區域的快速目標分割方法,實現了復雜背景下目標物體的穩定分割。










評論