基于雙計算機的仿人機器人的視覺跟蹤系統

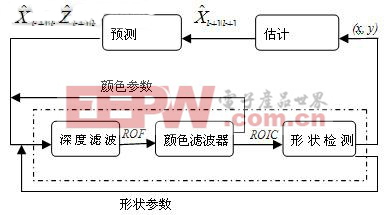
圖2 視頻序列中運動目標分割過程
本文利用仿人機器人的立體視覺系統,設計了融合深度,顏色,形狀信息的逐步逼近目標區域的快速跟蹤方法。圖2為視頻序列中運動目標的分割過程。首先利用深度信息把機器人關心的前景區域分割出來,得到ROF(Region of Foregroud)區域,即粗略的目標候選區域。在ROF中使用顏色濾波器分割,得到ROIC(Region of Interest Color)區域。最后形狀檢測器可以把相同顏色的物體區別開來。在分割過程中,候選目標區域逐步縮小并逼近目標區域。逐步縮小的候選目標區域減少了計算量,提高了系統的運算速度。同時,該方法有效的避免了場景中相同顏色物體的干擾,提高了目標分割的穩定性。圖3顯示了目標物體的分割結果。

圖3 復雜場景中目標物體的分割結
‘
機器人的運動控制子系統是一個典型的計算機控制系統。機器人頭部的控制目的是為了機器人的頭部能夠實時跟蹤運動目標,因此實際控制信號輸入量是根據目標物體的位置信息求得的規劃數據。在反饋信號的輸入方面,因為被控對象是電機轉動的角度,用電機上面的軸角編碼器的輸出作為反饋信號。
系統使用了一套多功能接口板,將所有的A/D轉換、D/A轉換、ENC(encoder)、PWM、IO等多種功能都集成在該接口板上,提高了系統的集成性并減小了系統體積和重量。多功能接口板上上的ENC接口來作為反饋信號的輸入通道,它可以測量軸角編碼器的脈沖輸出個數。每個運動關節采用經典的PD伺服控制。
3.2運動控制系統的軟件結構
運動控制子系統采用了RT-Linux(Real Time Linux)實時操作系統,其軟件結構如圖4所示,主要包括兩個模塊:主程序模塊、實時任務模塊,主程序模塊是linux應用程序,實時任務模塊是RTlinux下的實時進程。兩個模塊也是兩個進程,通過管道(FIFO)進行通訊等。

圖4 BHR1運動控制系統的軟件結構
實時任務主模塊包括兩部分:周期性執行的實時控制循環(即實時線程)和實時任務觸發器。實時線程的周期性執行是由一個循環實現的。該循環主要完成兩大功能:機器人運動控制、與各電機相連的軸角編碼器的信息采集。實時任務周期為3毫秒。實時任務周期是根據D/A通道處理時間和碼盤計數器讀取時間,以及傳感器信息獲取時間確定。










評論