嵌入式Win CE中CAN總線控制器的驅動設計與實現

摘 要:CAN總線是一種具有國際標準且性價比較高的現場總線,在當今自動控制領域的發展中發揮著重要的作用。這里簡要地介紹了CAN總線及其控制器sJAl000的工作原理和Win CE下流接口驅動程序的相關知識。采用Win CE流接口驅動程序實現對CAN控制器訪問并操作,并詳細地分析了SJA1000驅動程序的設計與實現,并使用Platform Builder將驅動編譯進內核,以動態鏈接庫的形式提供給用戶,為進一步開發嵌入式Win CE操作系統系統下CAN總線設備提供了一個良好的底層硬件驅動支持。
關鍵詞:CAN總線;SJAl000;WinCE;流接口驅動;Platform Builder
0 引 言
近年來,由于消費電子、計算機、通信(3c)一體化趨勢日趨明顯,嵌入式系統再度成為研究和應用的熱點。嵌入式操作系統(:Real-time Embedded OperatingSystem,RTOs或EOs)作為一種實時的、支持嵌入式系統應用的操作系統軟件,成為嵌入式系統(包括硬、軟件系統)極為重要的組成部分,通常包括與硬件相關的底層驅動軟件、系統內核、設備驅動接口、通信協議、圖形界面、標準化瀏覽器Browser等。Windows CE操作系統就是微軟公司從整體上為有限資源平臺設計的多線程、完整優先權、多任務的操作系統Win CE支持各種處理器產品家族,包括x86,Xscale,ARM,MIPS和SH系列。它的模塊化設計允許它對從掌上電腦到專用工業控制器的用戶電子設備進行定制,選擇系統模塊和組件的多少決定了所需內存的大小。
Windows CE操作系統之所以能夠支持各種各樣的硬件設備,是因為對每一款硬件設備,都有其對應的設備驅動程序,否則這款硬件就無法在Windows CE下正常工作。win CE提供了4種設備模型,其中2種是專門用于Win CE的模型,另外2種外部模型來自其他的操作系統。基于Win CE的兩種模型是本機的設備驅動程序和流接口的驅動程序;兩種外部模型用于通用串行總線(USB)和網絡驅動器接口標準(NDIS)驅動程序。下面針對Win CE系統下基于三星公司的ARM9內核芯片S3c2410的CAN總線控制器SJAl000,以流接口驅動程序形式進行設計。
l CAN總線及控制器工作原理
控制器局域網CAN是由ISO定義的串行通信總線,主要用于各種過程檢測及控制。它是一種多主總線,通信介質可以是雙絞線、同軸電纜或光導纖維。通信速率可達1 Mb/s。cAN總線通信接口中集成了CAN協議的物理層和數據鏈路層功能,可完成對通信數據的成幀處理,包括位填充、數據塊編碼、循環冗余檢驗、優先級判別等項工作。它的基本設計規范要求有高位速率和高抗電磁干擾性,而且能夠檢測出產生的任何錯誤。由于cAN串行通信總線具有這些特性,它很自然的在汽車制造業以及航空工業中受到廣泛應用。
SJAl000是一種獨立控制器用于移動目標和一般工業環境中的區域網絡控制(CAN)。它是Philips半導體公司的PC.A82(;200 CAN控制器(BasicCAN)的替代產品。而且它增加了一種新的工作模式(PeliCAN),這種模式支持具有很多新特性的CAN2.0B協議。其內部體系結構如下圖1所示。
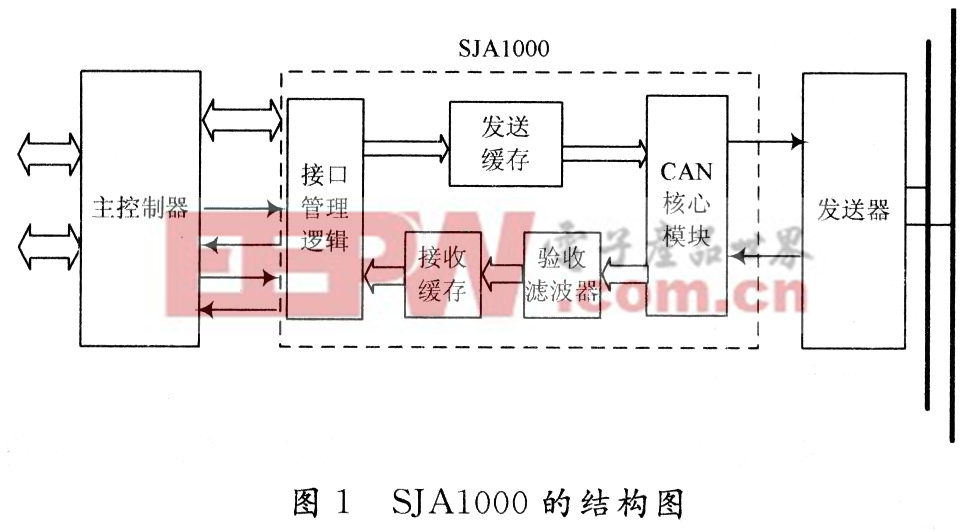
CAN核心模塊控制CAN幀的發送和接收。接口管理邏輯負責連接外部主控制器,該控制器可以是衛星控制器件或任何其他器件。經過SJAl000復用的地址/數據總線訪問寄存器和控制讀/寫選通信號都在這處理。SJAl000的發送緩沖器能夠存儲一個完整的報文(擴展或標準的)。當主控制器初始化發送,接口管理邏輯會使CAN核心模塊從發送緩沖器讀CAN報文。當收到一個報文時,CAN核心模塊將串行位流轉換成用于驗收濾波器的并行數據。通過這個可編程的濾波器,SJAl000能確定主控制器要接收哪些報文。所有收到的報文由驗收濾波器驗收并存儲在接收FIFO。儲存報文的多少由工作模式決定,最多能存儲32個報文。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)






評論