基于雙DSP的大功率變流器通用控制平臺的設計

鑒于該控制平臺采樣精度和采樣速率的需要,選用Analog Device公司的AD7865型A/D轉換器。該器件是一款高速、低功耗、4通道同步采樣的14位A/D轉換器,采用+5 V供電;其內部有1個2.4μs的逐次逼近的A/D轉換器,4個跟蹤/保持放大器,內部2.5 V參考電壓,片上時鐘振蕩器和1個高速并行接口;同步采樣4通道輸入信號,允許±10 V和±5 V兩種輸入范圍,這里選用±10 V輸入電壓。該設計每片AD7865都可同時采集4路模擬信號,圖2為AD7865部分信號調理電路。本文引用地址:http://www.j9360.com/article/151969.htm
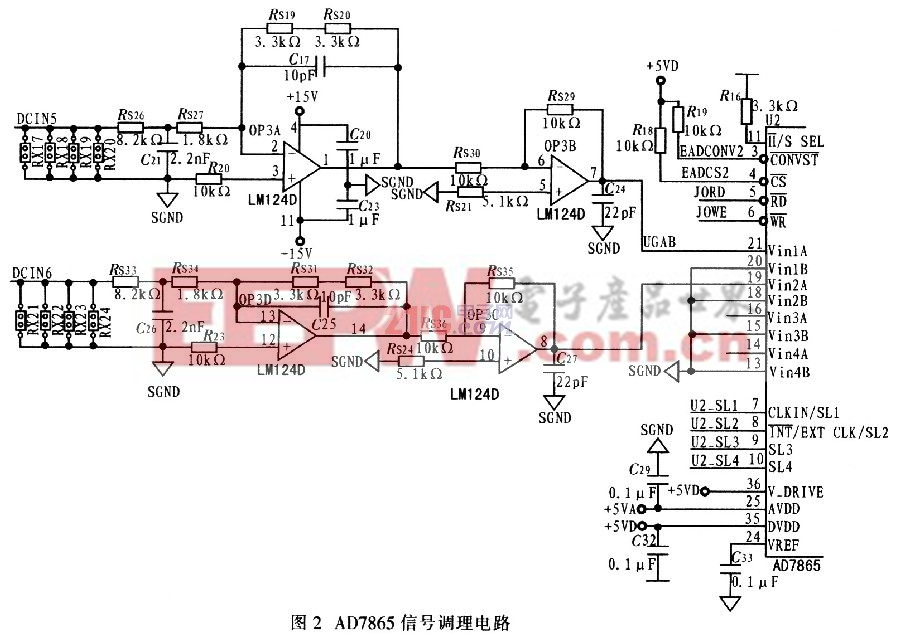
主回路輸入與輸出側三相線電壓、三相電流、直流電壓和電流、輸入與輸出濾波器線電流均經霍爾傳感器采集以電流輸出。霍爾傳感器輸出的電流信號通過插槽輸入A/D采樣電路,經精密電阻轉換為±15 V電壓信號。該電壓信號經具有調幅功能的有源低通濾波器轉化為+10 V的電壓信號,再經反相器送入AD7865的模擬量輸入端。AD7865的、BUSY、等控制信號是由TMS320C6713B的EMIF總線經EPM570T100型CPLD邏輯譯碼實現的。
2.1.2電機轉速檢測電路
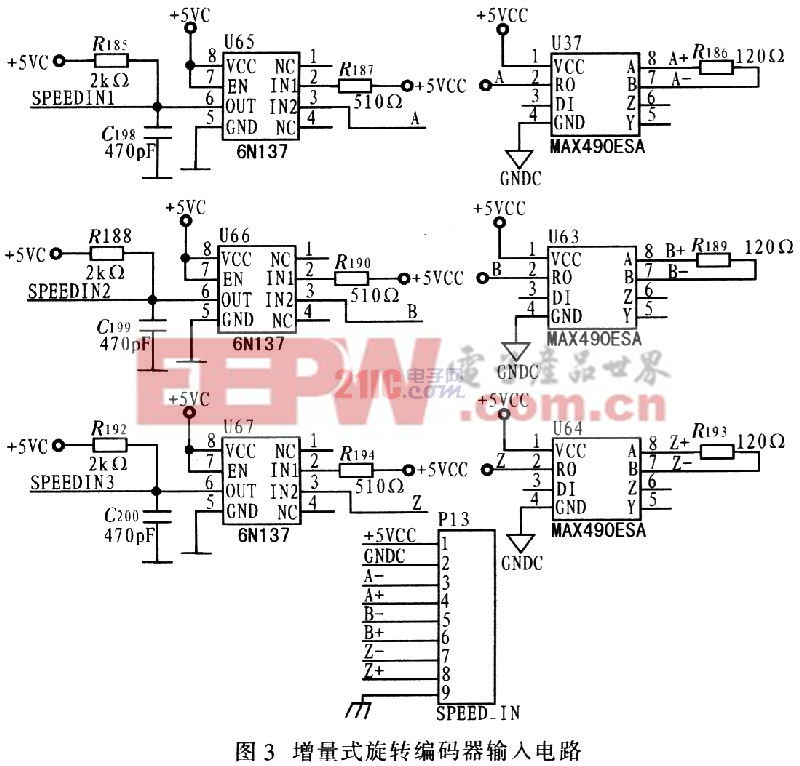
變流器通用控制平臺選用增量式光電編碼器設計電機測速器,其光電編碼器輸出脈沖波型相差90°的QEPI、QEP2兩相信號,正轉時QEPl相超前QEP2相;反轉QEP2相超前QEPl相。根據光電編碼器輸出光脈沖頻率測定電機轉速。增量式旋轉編碼器與被測電機同軸轉動,輸出A、B、Z 3路差分信號。其中A、B兩組脈沖相位差90°,可方便判斷旋轉方向,而Z路為每轉一個脈沖的基準點定位。這3路差分信號經MAX490ESA將差分信號轉換為邏輯信號,再經高速光耦6N137隔離送入TMS320F2812的正交脈沖編碼電路,測定電機轉速。增量式旋轉編碼器差分信號輸入電路如圖3所示。
2.2微處理器核心電路
通用控制平臺的核心單元主控制器需兼顧實現系統的定點與浮點運算、模擬采樣、保護、通信等功能,因此采用浮點DSP+定點DSP+FPGA的主控制器架構。其中,浮點DSPTMS320C6713B通過CPLD EPM570T100總線擴展AD7865完成三相電壓、電流。頻率以及直流電壓等控制參數;坐標變換等初級復雜浮點運算;控制算法實現以及運行狀態記錄存儲等。定點DSP TMS320F2812主要實現外設功能和部分定點運算。TMS320-F2812通過雙端口RAM IDT70V25讀取TMS320C6713B的運算結果;通過事件管理器模塊EVA、EVB實現SPWM,SVPWM;故障狀態檢測與保護;系統主回路開關狀態輸入輸出等。FPGA EP2C20Q240通過HPI接口與TMS320C6713B連接,通過McBSP接口與TMS320F2812。遠程PC機通過網絡在線更新雙DSP程序,從而更方便調試雙DSP。
2.3 PWM信號產生與輸出電路
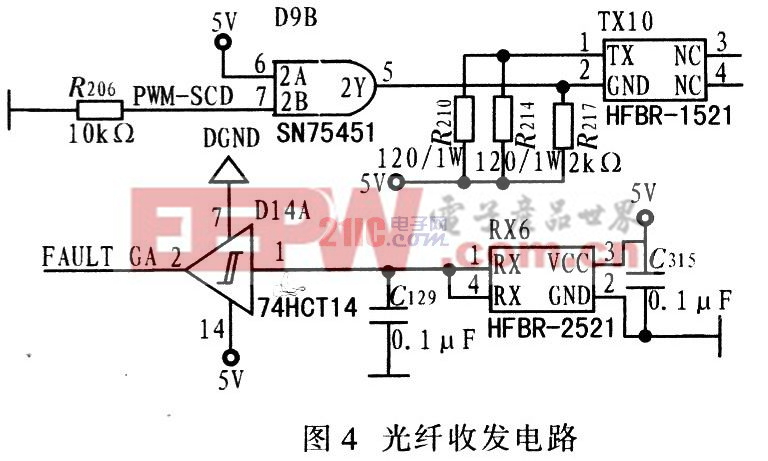
控制平臺通過SPWM、SVPWM等調制產生PWM控制信號實現變流器的控制,再經驅動電路控制IGBT、IPM模塊的主回路開關器,逆變產生交流輸出。在通用控制平臺上,將TMS320F2812中事件管理器EVA、EVB的16路PWM信號引入CPLD EPMl270T144,經CPLD處理和SN75451驅動后采用光纖HFBRl521輸出。通用控制平臺的PWM與主回路的驅動模塊之間均經光纖隔離,可有效消除主回路對控制平臺的干擾。驅動板同時通過16路光纖接收器HFBR252l接收驅動板發送的16路故障信號送至CPLD,用于封鎖PWM輸出。圖4為單路光纖收發電路。











評論