基于三星S3C2440A的Micro2440視覺處理平臺的構建

1 系統整體流程
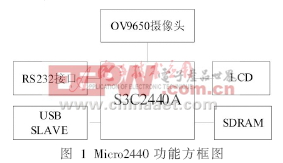
該平臺設計首先完成了基本的硬件初始化,而CMOS攝像頭驅動以及相應的圖像處理作為一個單獨的模塊進行加載運行。該嵌入式系統的加載啟動任務是由BootLoader(BootLoader是嵌入式系統加電后運行的第一段程序)來完成的。BootLoader分為兩個階段:第一階段通常由匯編語言實現完成部分硬件的初始化,創建C語言運行環境;第二階段繼續進行初始化完成MMU、LCD顯示等設置。在系統完成基本硬件的初始化工作后,便可以啟動攝像頭進行圖像、視頻的采集處理,系統結構如圖1所示。
BootLoader的第一階段啟動的流程依次為:ARM啟動或重啟→設置中斷向量→禁止看門狗、中斷→設置時鐘→Sdram初始化→復制RO/RW段到Sdram→ZI段清零→堆棧初始化→跳轉到main函數。第二階段則完成了以下操作:main函數→端口初始化→設置中斷請求→設置主頻→串口初始化→設置MMU→打開Cache→LCD初始化。ARM系統MMU的設計為了便于實現,采用了2段式的虛擬地址分配方式,每個頁(Section)的大小設置為1MB;同時為了減少對S3C2440地址的修改,采用了虛擬地址與物理地址相同的地址分配方式。
2 LCD設計
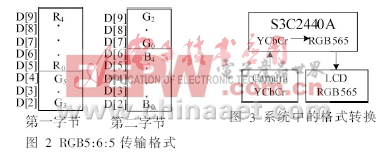
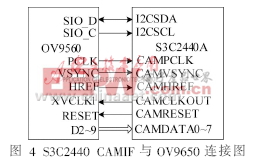
Micro2440開發板配有240×320/NEC3.5英寸T- FT真彩液晶屏,正確設置后能夠顯示清晰的圖像、視頻。S3C2440A的LCD控制器支持的屏幕大小包括480×640、240×320以及160×160等尺寸,能夠產生VFRAME、VLINE、VCLK、VM等控制信號。這些控制信號的使用需要配置S3C2440A的C端口為LCD控制。同時LCD的數據線VD[0]~ VD[7]也由C端口控制,VD[8]~VD[23]則由D端口控制,需要設置做為LCD數據線。由于使用的是TFT真彩液晶屏,需要把LCD控制寄存器設置為TFT模式,這里設置為TFT的16BPP(Bits Per Pixel)模式;同時還需要對LCDCON5進一步設置為5:6:5或5:5:5:1格式,這里設置RGB格式為5:6:5格式,此信號在OV9650傳輸如圖2所示[2]。以便和攝像頭的視頻輸出格式相一致,否則需要進行格式的轉化。在設置完幀緩存地址后,寫入數據,便可以實現圖像的顯示,格式轉換過程如圖3所示。
3 攝像頭驅動設計
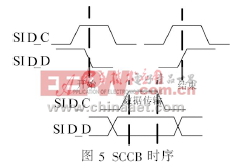
Micro2440開發板的配套攝像頭型號為OV9650,該攝像頭具有130萬像素,輸出視頻格式為YCbCr格式,同時S3C2440A的CAMIF(Camera Interface) 提供了ITU-R BT.601/656 8位標準輸入的支持[3],最大可采樣4 096×4 096像素的圖像[4],在Preview模式下支持輸出RGB 16/24 bit格式,這對于數字圖像的處理帶來了便利條件。S3C2440A的CAMIF與OV9650的連接如圖4所示。
OV9650驅動流程如下:設置Camera全局控制寄存器,并復位→配置S3C2440A的J端口→使能OV9650的Normal模式→設置接口時鐘→通過I2CSCL,I2C-SDA與SID_C, SID_D信號建立S3C2440A與OV9650的通信→設置OV9650的寄存器組→初始化3C2440A攝像頭接口,包括捕獲圖像的寬、高、偏移、輸入格式、輸出格式、緩沖區地址等→將OV9650將LCD緩沖區地址更改到Camera的緩沖區地址,以顯示Camera圖像→清除中斷→設置中斷處理函數→開始捕獲圖像。
其中,OV9650與S3C2440A的通信采用了兩線制的SCCB (Serial Camera Control Bus) [5],通過該接口可實現各種圖像增強和控制功能,如自動曝光、自動增益、自動白平衡控制等,以及控制圖像色彩、飽和度、銳化、鏡頭校準等[6]。S3C2440A控制端口產生SCCB的啟動、停止等控制信號,SCCB 協議中開始條件定義為:在SID_C 為高電平時, SID_D出現一個下降沿,則SCCB開始傳輸;停止條件定義為:在SID_C為高電平時, SID_D出現一個上升沿,則SCCB停止傳輸;在數據傳輸時,SID_C為高電平時,需要SID_D上的數據的穩定,以便傳輸,如圖5所示。
以寫一位數據傳輸為例,基本流程為:將數據放在SID_D上→啟動SID_C進行傳輸→延時傳輸后停止SID_C;同理,傳輸8位數據則需循環8次。類似地,讀取時基本流程為:啟動SID_C→讀取SID_D→停止SID_C。一個完整的數據傳輸的寫周期順序為:寫從設備的ID→寫設備寄存器的地址→將此寄存器中寫入數據。










評論