基于DSP與FPGA的全姿態指引儀圖形顯示系統設計

摘要:針對機載電子全姿態指引儀顯示圖形信息的特征及其變化特點,在系統初始化時將圖形內容分為背景層、填充層和動態字符層三層,運算過程中只改變根據參數變化的填充層和字符層;將圖形運算過程分為圖形輪廓生成和硬件區域填充,分別由DSP軟件標記區域邊界,FPGA根據標記硬件完成區域填充;同時圖形運算處理算法在所設計的DSP+FPGA的硬件平臺上進行了實現與驗證,結果表明,這種圖形處理方法減輕了傳統處理方法中主處理器的運算負擔,很大程度上提高了系統的實時性。
關鍵詞:機栽圖形顯示系統;電子全姿態指引儀;圖形分層;輪廓生成;區域填充算法
O 引言
隨著現代航空電子技術飛速發展以及飛機性能的提高,使得機載圖形顯示系統所顯示的參數越來越多,同時也對畫面顯示質量從人機工效學的角度提出了很高的要求。要保證圖形顯示的連續性,顯示系統必須以每秒50幀以上的頻率實時刷新。傳統的EADI圖形處理方法是采用軟件運算實現,速度較慢,占用大量的運算時間,從而使系統很難在規定的時間內完成區域填充、字符與直線旋轉、反走樣運算等較為耗時的運算。本文設計了基于DSP與FPGA的系統結構,采用了軟硬件填充的圖形處理方法,先由DSP軟件完成圖形輪廓生成,然后FPGA硬件圖形處理器根據圖形輪廓完成耗時的圖形填充,使系統在實時性方面取得了很好的效果并使得系統運算資源得到了合理的分配與利用。
1 全姿態指引儀的功能與原理
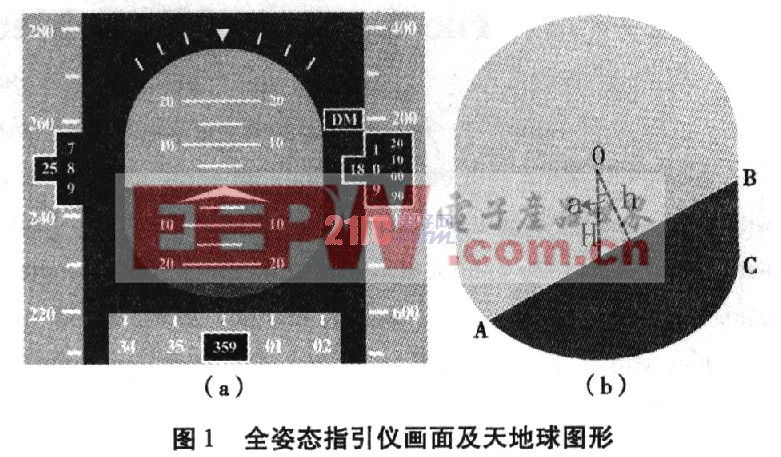
飛行儀表的綜合顯示系統主要包括全姿態指引儀、電子航道羅盤、導航儀和視景儀等模塊化儀表設備,其中電子全姿態指引儀的顯示信息包括姿態指引信息、高度信息、速度信息和工作狀態信息等。它的主要任務就是以動態圖形和字符的形式實時的顯示飛行參數,以便飛行員準確的獲取所需要的信息,并進行及時安全的操縱。全姿態指引儀區域填充運算主要針對內部天地球區域,如圖1(a)所示。以中間分界線即地平線為界,上部藍色區域代表天空,下部褐色區域代表陸地,地平線位置和角度決定兩個區域的形狀,在每次畫面刷新時都要重新生成圖形,上面疊加的字符和線段也要跟隨地平線一起旋轉。地平線的位置和角度是由兩個飛行參數決定的:俯仰角和側滾角。如圖l(b)所示,俯仰角θ決定地平線離圖形中心的垂直距離h,側滾角α決定其傾斜角度。
2 系統硬件結構設計
電子全姿態指引儀對實時性提出了嚴格的要求,其硬件系統結構需要具有穩定可靠、實時數據處理能力強的特點。隨著DSP與FPGA技術發展,DSP+FPGA系統結構在圖形圖像處理的應用場合突顯出很強的優越性,兩種器件分別適合復雜算法運算和硬件并行運算與控制。因而考慮將圖形運算分步處理,將輪廓生成的工作交給DSP,而區域填充由FPGA硬件完成,這便是軟硬件填充方法。
工作時,輸入是多路傳感器信號,經A/D轉換為數字信號,輸入到FPGAl中按照特定的算法對信號進行預處理后,存入雙口RAMl中。DSP又通過雙口RAMl讀取預處理后的數據,按照設定好的算法生成需要顯示的圖形與字符的輪廓,接著通過雙口RAM2傳給FPGA2,在FPGA2中完成字符圖形填充、反走樣、顯示等功能。DSP連接一個容量較大的SDRAM為全局共享外部存儲器,而FPGA通過連接一組容量較小的雙口RAM為局部共享存儲器。
3 圖形信息分層處理與顯示技術
3.1 DSP畫面初始化圖形分層
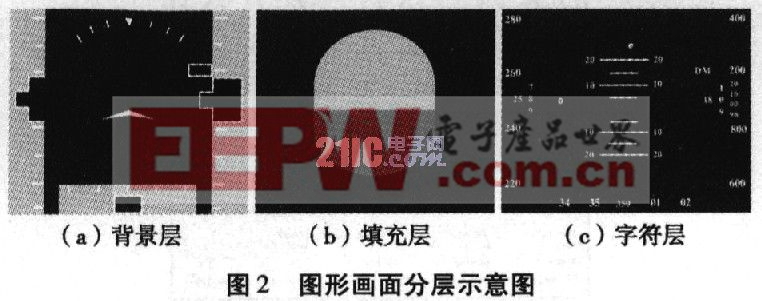
圖形區域主要分為三種類型:一是背景區域,數據量大,但在圖形變化過程中不隨參數變化而改變;二是填充區域,數據量大,并且在圖形變化過程中隨著參數變化而不斷改變;三是動態的字符與刻度信息,數據量小頻繁變化又不同于填充區域。根據圖形的特性,系統上電后首先進行畫面的初始化,將圖形分為背景層、填充層和動態字符層,背景層包括不隨參數改變的背景、刻度和字符等,填充層即天地球
區域,動態字符層包括動態字符和直線區域。區域填充過程對動態字符層的處理和背景層相同,因而將該層和背景層構成的區域稱為非填充區域。圖形的分層靠圖形區域標志位來區分,為0表示為非填充區域,為1表示為填充區域,區域標志位后跟隨著該點顏色信息。在畫面初始化中將天地球輪廓上點的坐標存為數組,以方便根據地平線的位置和角度來標記天地球填充區域的邊界。在畫面初始化后的輪廓重新生成過程中,背景層便不再改動,動態字符層信息因數據量小可每次都將改變了的部分擦除和重寫。DSP根據參數生成帶有填充區域邊界標記信息的填充層與背景層和動態字符層的疊加信息,就生成了一幅完整的圖形輪廓。圖2表示圖1(a)所示顯示畫面的分層結果,(a)、(b)和(c)分別為
背景層、填充層和動態字符層。

p2p機相關文章:p2p原理










評論