嵌入式電梯群控系統設計

目前,大多數電梯公司的群控系統都是采用RS485總線進行通信,但RS485采用主從式的通信方式,由主機發起呼叫,對應的終端應答,因此只能采取輪詢的通信方式,實時性差,一旦主機出現故障,整個系統將癱瘓;而CAN總線在電梯群控系統中卻體現出更多的優勢:CAN總線通信與RS485通信相比抗干擾能力更好;可連接較多的通信節點;通信速率更高;實時性與穩定性高,所以本文采用CAN總線來實現群控主機和各電梯之間的通信[2]。
1 系統總體結構
本系統以ARM7為內核,主頻達72 MHz的32 bit微處理器LPC2368作為群控主控制器,它有高達512 KB的片內Flash程序存儲器,具有在系統編程(ISP)和在應用編程(IAP)功能,同時LPC2368內部集成了2個CAN控制器,CAN控制器提供了一個完整的CAN協議(遵循CAN規范V2.0 B)實現方案。包含這個片內CAN控制器的微控制器用來構建功能強大的局域網,支持極高安全級別的分布式實時控制,可以用在汽車、工業環境、高速網絡和低價位多路連線的應用中。系統還選用了CAN總線收發器MPC2551,它可作為CAN控制器與物理總線接口,提供對總線的差動發送和接收能力。
2 通信模塊設計
2.1 通信模塊硬件實現
本系統采用LPC2368內部集成了的CAN控制器和高速CAN收發器MPC2551配合實現群控主機和各電梯之間的通信任務的,CAN模塊由2個部分組成:控制器和接收濾波器,所有的寄存器和RAM都作為32 bit的字來訪問。LPC2368的CAN控制器具有如下的特點:2個控制器和總線;支持11 bit和29 bit的標識符;雙重接收緩沖器和三態發送緩沖器;可編程的錯誤報警界限和可讀/寫訪問的錯誤計數器;仲裁丟失捕獲和錯誤代碼捕獲(帶有詳細的位位置);單次觸發的發送(不會重復發送);只聽模式(無應答、無活動錯誤標志);“自身”報文的接收(自接收請求)[3]。
LPC2368的接收濾波器有如下的特點:快速硬件實現的搜索算法,支持大量的CAN標識符;全局驗收濾波器識別所有CAN總線的11 bit和29 bit Rx標識符;允許11 bit和29 bit CAN標識符的明確定義和分組定義;驗收濾波器可以為選擇的標準標識符提供FullCAN-style自動接收。
高速CAN收發器MPC2551是一個可容錯的高速CAN器件,可作為CAN協議控制器和物理總線接口。MCP2551可為CAN協議控制器提供差分收發能力,它完全符合ISO-11898標準,包括能滿足24 V電壓要求。其工作速率高達1 Mb/s。典型情況下,CAN系統上的每個節點都必須有一個器件,把CAN控制器生成的數字信號轉化為適合總線傳輸(差分輸出)的信號。它也為CAN控制器和CAN總線上的高壓尖峰信號之間加入了緩沖器,這些高壓尖峰信號可能是由外部器件產生(EMI、ESD和電氣瞬態等)。
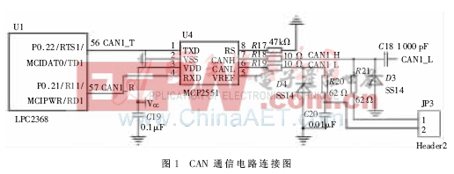
本系統設計的電路中,2個二極管D3與D4可有效地抑制傳輸介質的浪涌干擾,由于電梯群控系統中存在多個CAN通信節點,因此本電路中加入了終端電阻跳線JP3,由用戶靈活地選擇是否在該節點處加入終端通信電阻,本系統設計的CAN通信電路連接如圖1。
2.2 通信協議及通信軟件設計
2.2.1 CAN總線幀種類
CAN總線上傳輸的信息稱為報文,報文傳輸按照幀結構的不同,通常可表示為如下5種不同類型的幀:
(1)數據幀:用于發送單元向接收單元傳送數據的幀;
(2)遙控幀:用于接收單元向具有相同ID的發送單元請求數據的幀;
(3)錯誤幀:用于當檢測出錯誤時向其他單元通知錯誤的幀;
(4)過載幀:用于接收單元通知其尚未做好接收準備的幀;
(5)幀間隔:用于將數據幀及遙控幀與前面的幀分離開來的幀。






評論