基于ARM9嵌入式系統智能滅火機器人控制器設計

控制器是智能機器人處理和控制信息的主體,它直接決定了機器人的行為和性能。近幾年來隨著高性能微控制器和嵌入式系統技術的不斷進步,為各類實時控制應用提供了解決方案。
嵌入式系統(ES)是計算機技術、通信技術、半導體技術、微電子技術、語音圖像數據傳輸技術,甚至傳感器等先進技術和具體應用對象相結合后的系統,其是硬件和軟件緊密捆綁在一起的系統。將嵌入式系統應用于滅火機器人的設計中,對機器人的性能智能化、網絡化、小型化都有了明顯提高。
比賽用滅火機器人需要機器人有智能較高的自動控制性能與可靠的機械控制性能的同時保證,才能在短時間內準確尋找到火源并滅火回家。在此以ARM9處理器為核心,對基于嵌入式系統的智能滅火機器人進行了設計。本文將從硬件和軟件方面講述智能滅火機器人控制器的實現方法,并且給出了機器人滅火的具體實驗,驗證了方案的可行性,為智能滅火機器人的進一步研究提供了平臺。
l 滅火機器人的描述
滅火機器人的外形結構如圖1所示,它的主要構件有:紅外發射傳感器(6個),紅外接收傳感器(6個),聲音傳感器(1個),滅火風扇(前后各1個),遠紅外火焰傳感器等(前后各7個)。其中紅外發射和接受傳感器的配合使用可以使機器人自動避障行走。遠紅外火焰傳感器可以檢測光的強弱,用于判斷房間是否有火以及趨光滅火。聲音傳感器用于啟動。基于實踐,風扇滅火更為可靠,所以選用風扇滅火。

2 滅火機器人的總體設計
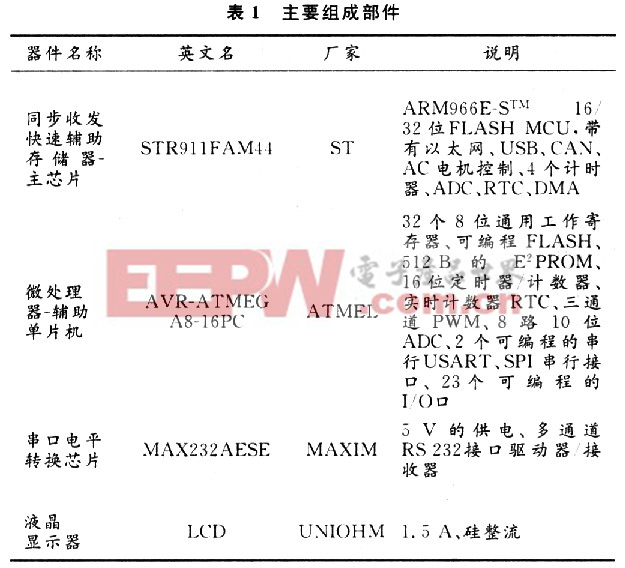
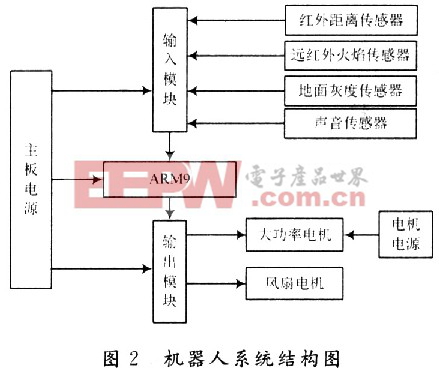
在智能滅火機器人系統中,首先要解決的是定位問題,故需要一個好的定位方案。所以,控制核心需要給傳感器留足夠的輸入接口,同時也要有足夠的輸出接口用于控制外設。而速度對滅火機器人至關重要,在高速運動的情況下,需要CPU具有比較強的浮點數運算能力。基于上述考慮,選擇ARM9為滅火機器人的控制核心,該控制器硬件功能齊全、功耗小、周邊設備集成度高,是先進的智能機器人計算平臺。它與其他的主要部件如表1所示,系統總體框架如圖2所示。








評論