多智能體合作通訊的設計

總體框圖:
本文引用地址:http://www.j9360.com/article/149033.htm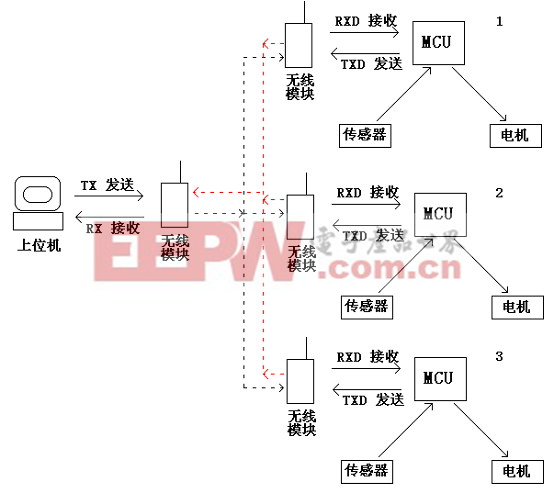
設計要求:
OSI七層參考模型
應用層
表示層
會話層
傳輸層
網絡層
數據鏈路層
物理層
按照OSI7層協議模型,在此數據鏈路層和物理層已經通過異步串行通訊協議UART定義,所設計的上層通訊協議是基于UART的。
設計思路與框架:
由于數據鏈路層與物理層都已經定義,所以還須定義網絡層,傳輸層,會話層,表示層,應用層。
協議基本結構:
OSI七層模型多智能體協議模型功能說明
應用層控制層馬達控制,A/D轉換
表示層命令,數據格式協議
會話層規則層從機發言順序協議
傳輸層
網絡層主從機地址協議
數據鏈路層通訊層UART串口通訊協議
物理層
我將所構思的協議劃分為三層,既控制層,規則層和通訊層。控制層相對應的是OSI中的應用層和表示層,其作用是理解和執行命令,采集環境變量并傳回數據。規則層相對應的是OSI中的會話層,傳輸層和網絡層,其作用是確保網絡中沒有人同時發言,確保從數據到達正確的目的地。通訊層相當于OSI中的物理層和數據鏈路層,在這里使用了UART串口通訊協議,通過此確保字符被正確地發送和接收。
1.通訊層
通訊層是三層中最底層的一層。它是上面兩層協議的基礎。在這里我們使用UART串口通訊協議。協議的具體細節在VISUALBASIC和BASCOMAVR中都已經制定好,只須采用現成的函數即可實現通訊層的數據鏈路層。
我們通過上海桑博電子科技有限公司生產的STR-18型微功率無線通訊模塊來實現通訊層中的物理層。它通過無線方式來傳輸數據,使機器人可以靈活移動。
硬件連接方法為所有的子機RXD,TXD都并聯,上位機的RXD與所有子機的TXD連接,上位機的TXD與所有子機的RXD連接。這樣,上位機可以與所有的子機通訊,但是子機與子機之間不能直接通訊,需要經過上位機中轉后才能通訊,并且同時只能有一個子機發言。
2.規則層
規則層對應了會話層,傳輸層和網絡層三層,然而我們只需要實現網絡層和會話層。因為機器人為單進程系統,無須考慮將數據分發到指定進程的問題。
網絡層對機器人的地址作出了規定。上位機的地址為OxOO,子機的地址為0x01至OxFF。地址碼大小為00至FF,即支持255臺子機和1臺上位機。
網絡層把數據包的結構定義為:第一個字節是目的地址碼,第二個字節為發送機地址碼,最后一個字節為結束標志Chr(13),中間為數據。數據中不可出現Chr(13),否則程序會誤認為數據包已經接收完成。
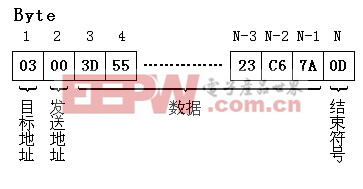
數據包結構示意圖
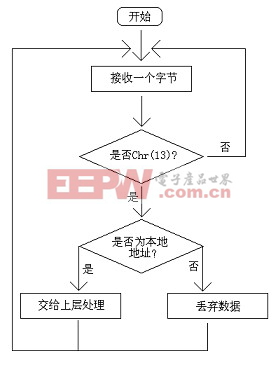
數據包接收完成,即接收到Chr(13)后,開始分析數據包。首先檢查數據包的第一個字節,若該字節與自身的地址碼相符,則繼續處理該數據包;若不同,則丟棄該數據包。
確認該數據包是屬于自己的以后,再把數據和發送地址交給控制層協議處理。
在子機和子機之間也要通訊的時候,上位機充當了一個數據中轉站的角色。當上位機接收到目標地址不為0x00的數據包時,則通過TXD把該數據包發送出去。
由于所有子機的TXD在同一條線上,如果有兩臺子機同時發送數據就會導致上位機無法正確接受數據,所以我們要通過協議來確保每時每刻最多只有一臺子機在發送數據。這就是會話層在此要解決的主要問題。
這里使用了主從結構,從機不主動發送數據,一切由上位機控制。當上位機想讓A機和B機發送數據時,上位機就對大家說“A,向我匯報情況”,然后A機說“我是A機,一切正常”,A說好后,上位機又說“B,向我匯報情況”,然后B機說“我是B機,一切正常”,通訊結束。
如果上位機說好“A,向我匯報情況”后,A機超過100MS沒有反映,則再次重復。若A機超過500MS沒有反映,則上位機就認為A機不正常,跳過A機詢問B機。
由于在數據包頭已經包含了目標地址碼,所以在命令子機發送數據時命令中無須再出現地址碼。我規定,“TALK*”為讓子機發送數據的命令。
上位機每次請求子機發言,都必須是在上一次通訊結束后才能開始下一次通訊。否則會引起總線沖突。同時詢問的次數必須考慮傳輸的波特率與子機的計算速度,否則會導致整體效率低下。
3.控制層
控制層為上層協議,主要任務是與環境,人交互和控制機械部分完成實際的任務。它是直接面對我們的一層協議。
控制層要完成的任務為:按命令控制馬達與舵機,采集傳感器數值并發送,采集人的決策或根據傳回的數據自動作出決策,協調各機器人的運動和任務分配等。
我規定,一條命令由兩個字節組成。第一個字節為設備代碼,第二個字節為狀態代碼。每個數據包可以包含多條命令,由于設備代碼只有256個,所以每個數據包的長度最多只有515字節,因此無須分割。
每個設備都有其自身獨立的設備代碼,并且設備狀態對其有實際的意義。由于狀態代碼為0-255,所以每個設備最多只能有256種狀態。因此PWM信號的精度最高只能為1/256。
當子機接收到了有效數據時,便將其第一條命令剝離,解釋,執行,然后再把第二條命令剝離,解釋,執行,直到全部命令都被剝離完。
上位機首先做出決策,例如“A往左,B往右”,然后分離為“A往左”和“B往右”,接著分離為“A的1號電機反轉,2號電機正轉”,“B的1號電機正轉,2號電機反轉”,最后分為2個數據包發送出去。











評論