基于DSP和APD的水下激光信號采集系統

摘要:針對水下藍綠激光傳輸環境的特殊性,提供了一種基于定點DSP芯片TMS320F2812和APD(雪崩二極管)技術的水下激光發射控制及回波信號采集的系統。給出了系統的總體結構、硬件實現和軟件程序設計,其中對APD處理電路和DSP的ADC控制模塊做了詳細的設計。通過實驗測試表明,該系統能夠準確地采集水下激光的回波信號,便于后期的水下激光傳輸特性的研關鍵詞:水下激光;APD;TMS320F2812;信號采集
0 引言
藍綠激光在水下可用波長為0.45~0.55μm波段內,在海水中的穿透深度可達300 m以上。在用于水下通信時,準直性好,不易被截獲,且不受電磁輻射和核輻射的影響;它的發射設備更為輕巧,隱蔽安全。在用于水下目標探測時,搜索效率和探測點密度遠遠高于聲納,可用于精度和機動性要求高的場合。
激光在水下傳輸以及探測都和海水介質以及水下的流場環境有很大的關系,激光的衰減有其規律性,因此通過采集連續激光探測到目標產生的回波信號,然后與理想的激光功率曲線對比,就可以準確地分析出水下激光傳輸的相關特性,從而為水下目標探測和水下通信提供很好的理論基礎。
目前,文獻主要是用蒙特卡羅模擬的方法研究激光在水中的傳輸機制,而隨著APD(Avalanche Photo Diode,雪崩光電二極管)以及DSP(Digital Signal Processor,數字信號處理器)的發展,DSP芯片在各種領域得到廣泛的應用,如文獻設計的基于DSP的數據采集系統,這使得水下信號的采集以及后處理分析變得成熟。因此本文根據水下連續激光傳輸環境的特殊性,設計了激光水下發射控制以及回波信號采集的系統,它是基于DSP的高精度、低功耗系統。
1 系統設計
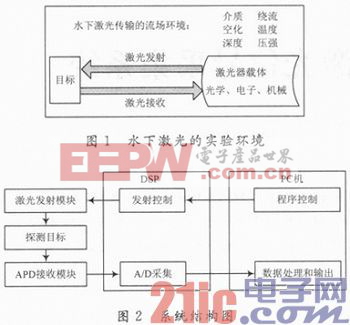
該系統的水下實驗環境如圖1所示。該系統由激光發射模塊、APD接收模塊、DSP電路、PC機四大主要部分組成。將激光發射和接收的載體置于實驗環境中。上位機通過DSP控制激光發射模塊,發射連續的藍綠激光,激光探測目標后產生回波,APD接收到該回波信號進行預處理,并發送到DSP的外圍處理模塊,然后經過DSP內部集成的A/D轉換模塊轉換為數字量,最終通過串口通信將數據輸出到上位機中進行顯示和后處理,系統結構框圖如圖2所示。DSP芯片作為下位機的MCU(Micro Control Unit,微控制單元),它主要實現的是激光器發射電源通斷控制以及激光回波信號采集和A/D轉換。
2 硬件設計
該系統的硬件系統主要由APD接收模塊、中間調理電路、DSP控制電路三大部分組成。
2.1 APD接收模塊
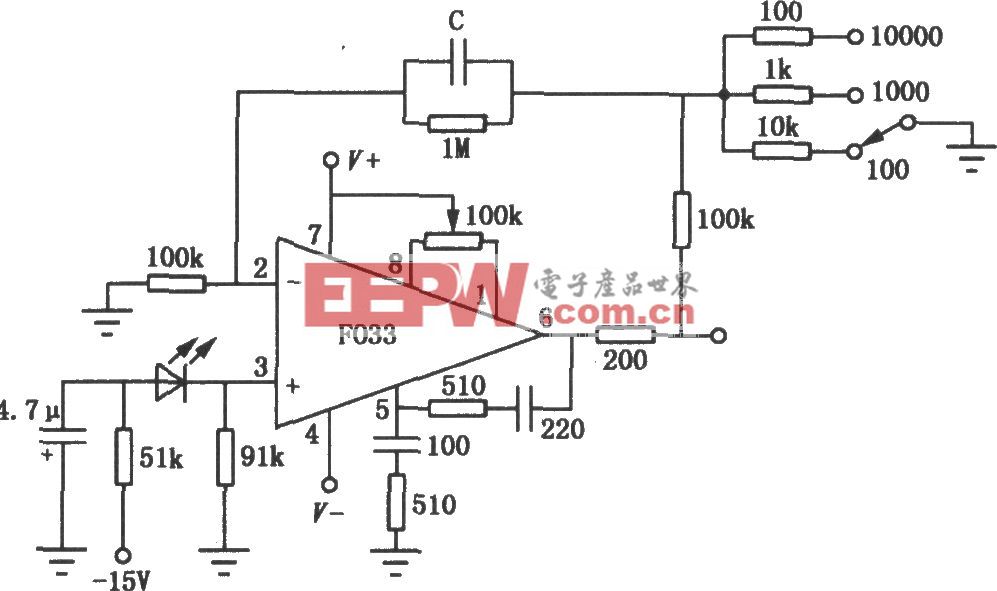
該模塊主要包括光學透鏡、放大電路以及電源電路,如圖3所示。光學透鏡的選擇取決于激光的作用距離、傳輸介質、焦距、透光直徑要求、幾何尺寸要求等,具體設計可參考文獻。

APD稱為雪崩二極管,它是利用光電效應把光信號轉變為電信號的光電檢測器件,主要作用是檢測經過傳輸的微弱光信號,并放大、整形、再生成原傳輸信號。APD的工作原理是通過光電效應產生電子和空穴在高電場區運動時被迅速加速,可能多次碰撞其他原子產生的結果使載流子迅速增加,反向電流迅速加大,形成雪崩倍增效應。選擇使用APD的原因主要為通過利用雪崩倍增效應使光電流得到倍增后的接收高靈敏度。它的優點很多,具有靈敏度高、響應快、噪聲小、成本低和可靠性高等特點。APD工作條件:需要有一定的反向偏壓才能產生相應的倍增效應,其計算公式如下:
APD的光電流:
式中:Io為初始的光電流;Iop為倍增后的光電流。
APD存在擊穿電壓Vbr當Vapd=Vbr時,M為∞,此時雪崩倍增噪聲也變得非常大,這種情況為APD擊穿。該處APD選擇的是上海歐光公司的AD500—8TO,它的擊穿電壓在80~200 V,最大倍增M可以達到100,暗電流最大值為0.25 mA。
選用MAXSIM的MAX5026主要是提供大于90 V的高壓,用于APD的反向擊穿。MAX5026是固定頻率、脈沖寬度可調的低噪音升壓式轉換器,是能產生高電壓的低壓系統。由于具有低噪音、輸出電壓高的特點,因此被廣泛用于升壓、反饋、隔離輸出等拓撲結構中。其工作電壓最低為3 V,轉換頻率為500 kHz。固定頻率、電流式PWM的結構使其低的輸出噪音很容易被濾掉。MAX5026用于提高輸出電壓時需要外接一個反饋電阻,其輸出電壓通過兩個外接電阻R1和R2確定。如圖4所示,R2為固定值,通過調節R1可調電阻的阻值提供一定范圍的高壓。由于MAX5026的轉換頻率高,因此需要一個高速整流器。肖特基二極管可以滿足很多應用的要求,是因為其具有恢復時間快,管壓降低的優點。選擇二極管的額定電流值要大于或等于電感電流的峰值,并且二極管的反向截止電壓必須大于輸出電壓,因此選擇串聯兩個1N4148,其單個的耐壓值為100 V。

波段開關相關文章:波段開關原理
激光器相關文章:激光器原理 激光二極管相關文章:激光二極管原理








評論