GPS接收器測試

方法 2:以接收器供電至主動式天線
本文引用地址:http://www.j9360.com/article/143528.htm供電至主動式 GPS 天線的第二個方法,即是透過天線本身的接收器。大多數的現成 GPS 接收器,均使用單一端口供電至主動式 GPS 天線,且此端口亦透過合適的 DC 訊號達到偏壓。若將主動式 GPS 接收器整合分裂器 (Splitter) 與 DC 阻絕器 (Blocker),即可供電至主動式 LNA,并僅記錄 GPS 接收器所獲得的訊號。下圖即為正確的連結方式:
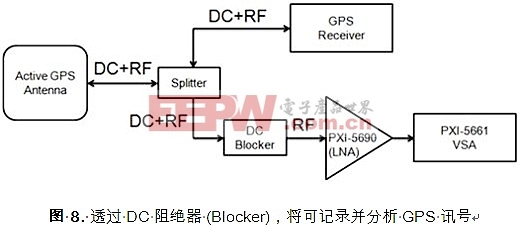
如圖 8 所示,GPS 接收器的 DC 偏壓即用以供電至 LNA。請注意,由于當進行記錄時,即可觀察接收器的相關特性,如速度與精確度衰減 (Dilution) 情形,因此方法 2 特別適用于驅動程序測試。
串聯式 (Noise figure) 噪聲系數計算
若要計算已記錄 GPS 訊號的總噪聲量,只要找出整體 RF 前端的噪聲系數即可。就一般情況來說,整組系統的噪聲系數,往往受到系統的第一組放大器所影響。在所有 RF 組件或系統中,噪聲系數均可視為 SNRin 與 SNRout (參閱:量測技術的噪聲系數) 的比例。當記錄 GPS 訊號時,必須先找出整體 RF 前端的噪聲系數。
當執行串聯式噪聲系數計算時,必須先行針對每筆噪聲系數與增益,將之轉換為線性等式;即所謂的「噪聲因子 (Noise factor)」。當以串聯的 RF 組件計算系統的噪聲系數時,即可先找出系統的噪聲因子,并接著轉換為噪聲系數。因此系統的噪聲系數必須使用下列等式計算之:
等式 2. 串聯式 RF 放大器的噪聲系數計算作業 [3]
請注意,由于噪聲因子 (nf) 與增益 (g) 屬于線性關系而非對數 (Logarithmic) 關系,因此以小寫表示之。下列即為增益與噪聲系數,從線性轉換為對數 (反之亦然) 的等式:

等式 3 到等式 6. 增益與噪聲系數的線性/對數轉換 [3]
內建低噪聲放大器 (LNA) 的主動式 GPS 天線,一般均提供 30 dB 的增益,且其噪聲系數約為 1.5 dB。在儀控記錄作業的第二階段,則由 NI PXI-5690 提供 30 dB 的附加增益。由于其噪聲系數較高 (5 dB),因此第二組放大器僅將產生極小的噪聲至系統中。在教學實作中,可針對記錄儀控作業的完整 RF 前端,使用等式 2 計算其噪聲因子。增益與噪聲系數值即如下圖所示:











評論