1KPZ-250型開溝鋪管機GPS自動導航系統設計

摘要:以1KPZ-250型開溝鋪管機為試驗平臺,采用RTK-GPS定位技術,進行農業機械自動導航試驗。針對開溝鋪管機液壓驅動,履帶式行走機構的特點,設計了左右履帶行走速度控制與監測系統,實現了開溝鋪管機行走自動控制。根據GPS接收機與車載傳感器獲取車輛姿態信息,采用PID控制方法,構建轉向閉環控制系統,實現開溝鋪管機的自動對行導航,并進行了開溝鋪管機田間導航跟蹤試驗。試驗結果表明,在開溝鋪管機對行導航作業中,車輛行進速度不大于0.5m/s時,對行跟蹤誤差小于10cm,完全可以滿足開溝鋪管作業精度要求。
本文引用地址:http://www.j9360.com/article/139188.htm引言
我國北方以及沿海地區有著相當數量的鹽堿地需要治理和改造,依靠人工開溝、鋪管,不僅效率低,勞動強度大,作業成本高,而且工程質量難以保證。1KPZ-250型開溝鋪管機是專用于暗管排堿技術的大型工程機械,可將滲管以精確的高程和坡度埋入地下,同時在滲管周圍包上一定厚度的沙礫料。滲管的高程和坡度由激光制導系統來控制,而滲管鋪設的直線度,需要人為在地頭兩端豎立標志桿,用于指引開溝鋪管機上的駕駛員直線行駛。由于田間作業風沙大,駕駛員的駕駛水平及長時間枯燥乏味的跟蹤駕駛,對開溝鋪管作業的直線度有很大影響,并且需要專人豎立標桿,存在不安全因素。開溝鋪管機實現GPS自動對行行走將有效地減輕駕駛員的勞動強度,減少勞動力,提高滲管鋪設直線度精度。本文以1KPZ-250型開溝鋪管機為平臺,對其履帶式行走機構進行電控設計,結合GPS技術與智能控制策略,使開溝鋪管機能跟蹤預設直線路徑行走,實現開溝鋪管自動導航作業。
開溝鋪管機行走機構電控設計
1KPZ-250型開溝鋪管機采用液壓驅動,履帶式行走機構,左右履帶各有一套液壓驅動裝置,通過調節伺服閥開度來改變驅動馬達上的液壓流量,從而控制左右履帶行走速度。驅動馬達上安裝有測速編碼器,通過采集編碼器數字脈沖信號,可推算出左右履帶行走速度。行走機構電控系統結構如圖1所示。
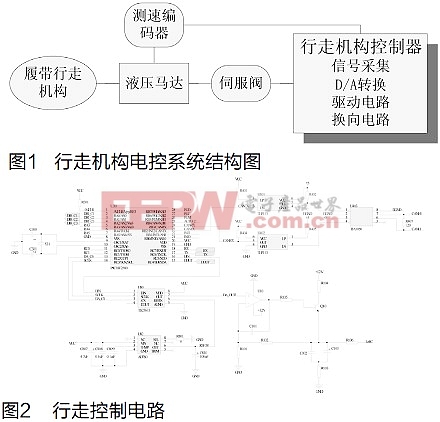
開溝鋪管機行走控制器是硬件設計的核心部分,它由傳感器信號采集、D/A轉換、電壓跟隨驅動電路、微控制器和串行總線接口組成。主要控制電路設計如圖2所示。微控制器采用Microchip公司的PIC18F2580。通過CAN總線與車載計算機進行數據通訊,布線簡單,通訊可靠性高。通過數模D/A轉換器將數字信號轉換成電壓模擬信號,D/A轉換器采用TLC5615,與微控制器采用3線串行輸入,10位數模轉換輸出,其參考電壓源3V由芯片AD780提供,D/A轉換分辨率為3mV/bit,使系統具有較高的轉換輸出精度。U10運算放大器與電阻R101、R102組成電壓放大電路,Q10三極管提高驅動電路帶負載的能力,輸出信號通過限流電阻R106加載到電磁閥線圈上,可實現對電磁閥開度的控制,從而達到調節驅動馬達轉速的目的。微控制器采用定時計數方式對測速編碼器信號進行采集,通過行走動力傳動比,推算出左右履帶的行走速度。整個系統采用24V工作電壓,低功耗設計,與外部設備的接口進行光電隔離,降低外部干擾,提高系統工作可靠性。


pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理













評論