--激光制導自動跟蹤焊接系統


為了取代諸如橋面焊接等在巨型結構上實施的拱焊接傳統工藝,我們推出了采用英飛凌32位微控制器“TriCore TC1797”的自動跟蹤焊接系統,以確保焊接施工的精確、高效和安全。
概念
該系統由一個以固定步長(1毫米)在斜坡滑道上移動的模塊以及垂直激光束、攝像頭和焊槍組成。
每移動一個步長,攝像頭就會以待焊接的兩片金屬板的結合處附近為中心,對垂直激光束拍照。
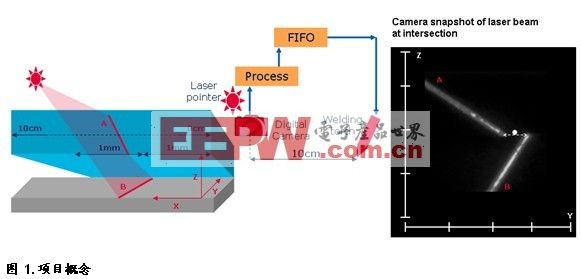
圖內文字:
Laser pointer:激光指針
Process:圖像處理算法
FIFO:先入先出緩沖區
Digital camera:數碼相機
Welding torch:焊槍
Camera snapshot of ……:結合處的激光束快照
這會在照片上形成1個缺口和2條斷開的激光線(A和B),圖像處理算法將利用這些數據來計算所需的焊接坐標值(X、Y和Z)。
當模塊在移動的同時,圖像處理算法也會將計算得到的焊接坐標值保存到一個先入先出(FIFO)緩沖區中。焊接系統將利用該FIFO緩沖區,使焊槍移動至正確的位置。這個過程將不斷重復,直至到達滑道末端。
這種方法能夠補償焊接過程中出現的任何位置錯誤,并且可以在不規則通道上實施焊接。








評論