基于ADUC7026的數字PID算法在基站功率控制中的應用
—— Digital PID Arithmetic Based on ADUC7026 for PA Monitor

前言
本文引用地址:http://www.j9360.com/article/106445.htm數字PID控制在生產過程中是一種最普遍采用的控制方法,其特點是結構簡單,穩定性好,工作可靠,調整方便,多被應用到被控對象的結構和參數不能完全掌握或得不到精確數學模型的環境中。將數字PID控制算法應用于基站發射功率控制,可以極大地提高基站發射功率的穩定性和可靠性,控制輸出功率在覆蓋允許范圍內,不至過小無法滿足網絡規劃時的覆蓋距離要求,而減少小區覆蓋范圍,又不會產生過強的輸出信號對相鄰基站造成干擾。本文首先分析數字PID控制算法中的兩種常見算法,而后重點討論它們在基于ADUC7026的基站功率控制中的應用方法,并對比它們的測試結果,給出結論。
數字PID控制
PID控制
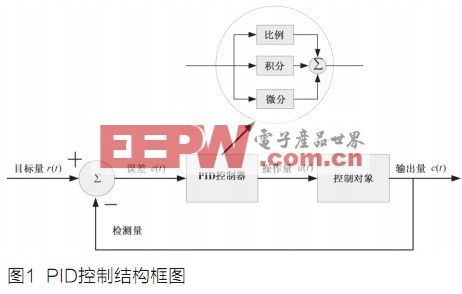
常規PID控制系統原理框圖如圖1所示,其控制規律為:
![]()
式中u(t)為操作量,e(t)為誤差,KP為比例系數,KP為積分系數,KD為微分系數。簡單說來,PID控制器各校正環節的作用如下:
比例環節
比例控制是一種最簡單的控制方式,控制器的輸出與輸入誤差信號成比例關系。偏差一旦產生,控制器立即產生控制作用,以減少偏差。
積分環節
在積分控制中,控制器的輸出與輸入誤差信號的積分成正比關系。對一個自動控制系統,如果在進入穩態后存在穩態誤差,則稱這個控制系統是有穩態誤差的或簡稱有差系統。而積分環節主要用于消除靜差,提高系統的無差度。









評論