上海交通大學SmartStar隊技術報告(節選)

賽車硬件設計概述
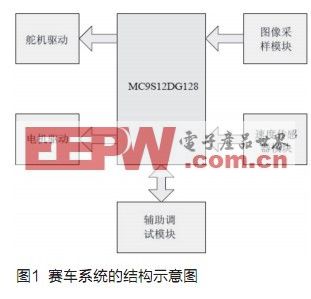
本文引用地址:http://www.j9360.com/article/105945.htm根據攝像頭方案設計,賽車共包括六大模塊:控制處理芯片MC9S12DG128,圖像采樣模塊,速度傳感模塊,舵機驅動模塊,電機驅動模塊和輔助調試模塊。其中S12 單片機是系統的核心部分。它負責接收賽道圖像數據、賽車速度等反饋信息,并對這些信息進行恰當的處理,形成合適的控制量來對舵機與驅動電機進行控制。
圖像采樣模塊由S12 的I/O 口、供電電路、與數字攝像頭組成。其功能是獲取前方賽道的圖像數據,以供S12 作進一步分析處理。速度傳感器模塊由光電編碼器和ECT 脈沖捕捉功能構成。舵機模塊和驅動模塊分別用于實現賽車轉向和驅動。輔助調試模塊主要用于賽車系統的程序燒寫、功能調試和測試、賽車狀態監控、賽車系統參數和運行策略設置等方面。本賽車系統的結構示意圖如圖1。
賽車軟件設計概述
如果說系統硬件對于賽車來說是它的骨架和軀體,那么軟件算法就是它的思想。有了健壯、靈敏的軀體還需要有聰明、智慧的大腦。所以軟件系統對于賽車來說至關重要。首先,賽車系統通過圖像采樣模塊獲取前方賽道的圖像數據,同時通過速度傳感器模塊實時獲取賽車的速度。然后S12利用邊緣檢測方法從圖像數據中提取賽道黑線,求得賽車與黑線位置的偏差,接著采用PID方法對舵機進行反饋控制。最終賽車根據檢測到的速度,結合我們的速度控制策略,對賽車速度不斷進行恰當的控制調整,使賽車在符合比賽規則情況下沿賽道快速前進。設計賽車系統的軟件結構如圖2所示。












評論