基于LIN總線汽車前燈運動控制系統的設計

引言
本文引用地址:http://www.j9360.com/article/101025.htm隨著社會的發展,汽車越來越普及,汽車應用已變得日益復雜,而且越來越多地采用電子驅動,因此,將更多創新技術及專用技術應用在這個領域也就不足為奇了。隨著汽車擁有量的增加,發生交通事故的概率也隨之增加,特別是在夜間行車,兩車相匯,汽車前燈的控制就是一個重要的問題,目前汽車常包含有帶動態位置控制的前燈,特別是對高強度放電(HID)氙氣燈來說,動態位置控制功能非常關鍵。不過,前燈定位系統對電子組件提出了非常惡劣的環境要求。如何降低前燈運動控制設計的復雜度,節省時間、降低成本成為汽車電子研究的重要課題,本文針對汽車前燈控制的要求,介紹一種價格低,功能較齊,基于LIN總線汽車前燈運動控制系統的實現方法,對不同的步進驅動器/控制器組合,以實現汽車前燈運動控制系統最優化的系統設計方案。
系統硬件電路設計
LIN標準定義了一種車用分布式電子系統使用的低成本串行通訊系統。LIN是對現有車用多網絡組合的補充,這些組合包括采用控制器局域網絡(CAN)協議。LIN標準可以實現具有成本效益的車內開關、智能傳感器和制動器應用的通訊網絡。通訊協議是基于SCI (UART)數據格式,一種單主/多從的概念以及一個單線(外加地)12V總線。
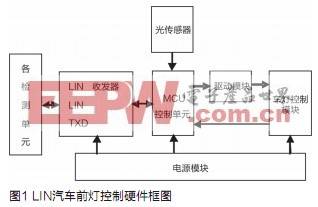
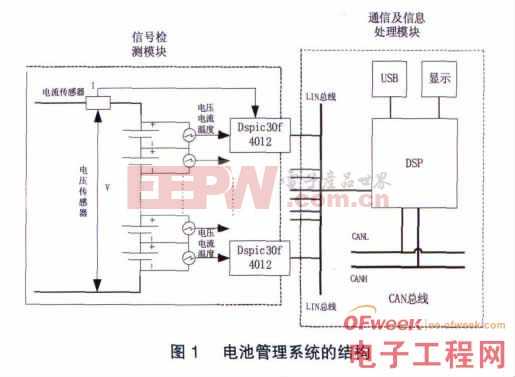
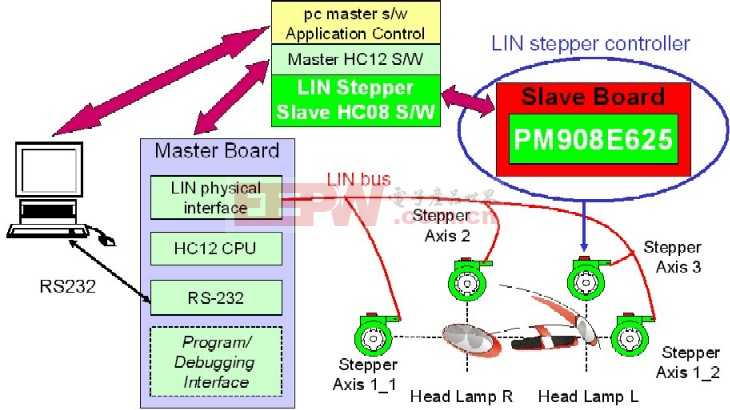
LIN從節點對總節點發出的控制信號進行處理,并對車燈驅動電路狀態進行測量。當從節點接收到報文信息后,對車燈發出相應的控制信號,并分析各燈的狀態,若發生故障,則生成一個數據信息發送到總節點。LIN從節點在檢測到總節點發送的信號后,先通過報文幀進行識別,看其是否屬于自己的報文信息。若屬于則首先判斷報文是不是查詢信息,如果是,則返回一個響應信息,如果是控制信息,則對相應的車燈進行控制,并對該車燈驅動電路上的測量點電位進行測量和進行處理。看其是否發生故障。若發生故障,則通過 LIN總線發送信息給總節點。并根據傳感器檢測到前方來車的燈光信號,實時的作出判斷,調整燈光的亮度和變化。圖l示出LIN汽車前燈控制硬件框圖。
MCU控制單元
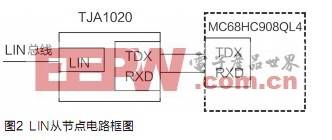
設計中MCU選用飛思卡爾M68HC08系列的MC68HC908QL4作為LIN從節點的MCU,其電路框圖如圖2所示。16引腳TOP封裝的QL4芯片,VDD接+5V電源,SLCTX、SLCRX引腳分別接LIN的收發器(TJA1020)的TXD、RXD引腳。經過收發器LIN引腳進來+12V的LIN信號,經過收發器轉換成+5V的接受和發送信號,分別傳到QL4的接受和發送引腳。
從節點在初始化完成后,其它操作都在中斷里面完成。SLIC狀態向量寄存器(SLCSV)提供一個索引偏移量直接反映LIN模塊當前的工作狀態,它可以和用戶提供的跳轉表一起用來快速進入一個中斷服務子程序。LIN模塊的所有狀態在SLCSV里面都有相應的值對應,其值不僅反映LIN模塊狀態的索引偏移量,還反映中斷的優先級。






評論