瑞芯微RK356X主板復用接口配置方法,觸覺智能嵌入式方案商

本文介紹瑞芯微RK356X系列復用接口配置的方法,基于觸覺智能RK3562開發板演示,搭載4核A53處理器,主頻高達2.0GHz;內置獨立1Tops算力NPU,可應用于物聯網網關、平板電腦、智能家居、教育電子、工業顯示與控制等行業。
復用接口介紹
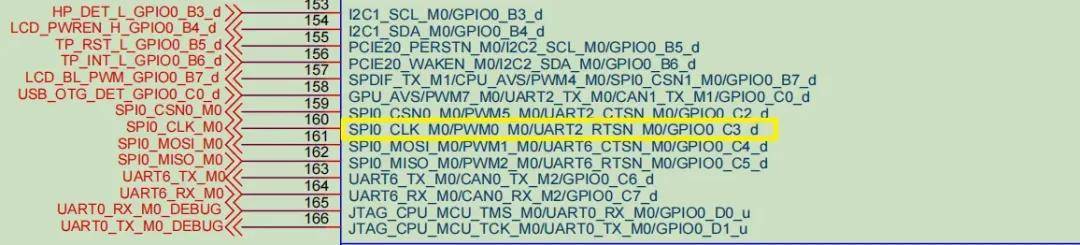
由下圖可知,紅圈內容當前引腳可配置為SPI0或者PWM0功能。
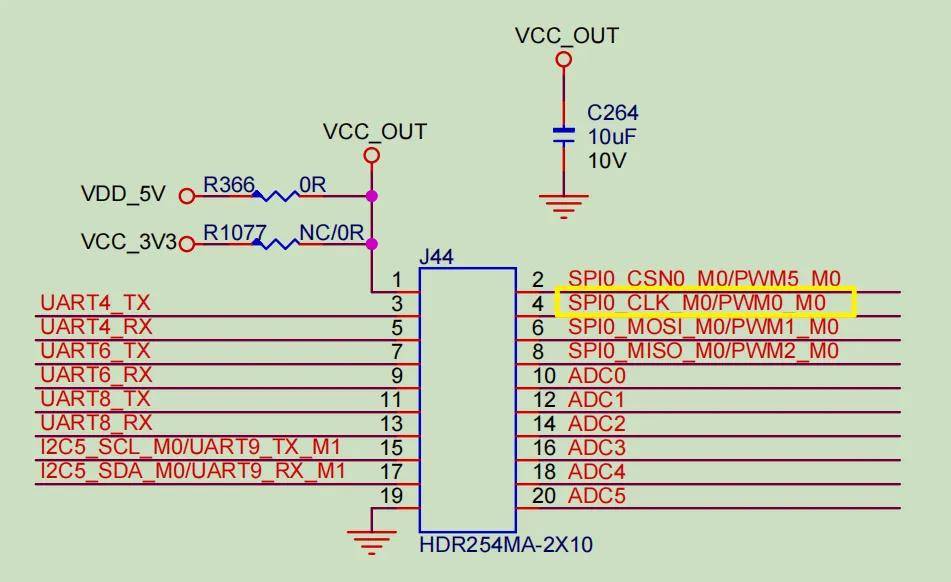
由標準系統固件以及相關系統手冊可得,當前接口默認配置為SPI0功能:
console:/ # ls dev/spidev0.0
dev/spidev0.0
再由原理圖可知當前GPIO為GPIO0_C3,下面開始將SPI0功能配置為PWM0功能。
設備樹配置
設備樹路徑:
kernel-5.10/arch/arm64/boot/dts/rockchip/
第1步,禁用SPI功能,文件路徑如下:
ido-evb3562-v1b.dtsi
&spi0 {
+ status = "disabled";
pinctrl-0 = <&spi0m0_pins &spi0m0_csn0>;
spi_dev@0 {
compatible = "rockchip,spidev";
reg = <0>;
spi-max-frequency = <12000000>;
spi-lsb-first;
};
};
第2步,獲取PWM0配置屬性,在rk3562-pinctrl.dtsi文件獲取PWM0 pinctrl屬性,結合GPIO編號GPIO0_C3獲取。
pwm0 {
/omit-if-no-ref/
pwm0m0_pins: pwm0m0-pins {
rockchip,pins =
/* pwm0_m0 */
<0 RK_PC3 2 &pcfg_pull_none_drv_level_1>;
};
...
};
由上可得,當前PWM0 princtrl屬性為:pwm0m0_pins
第3步,配置PWM0
&pwm0 {
pinctrl-0 = <&pwm0m0_pins>;
status = "okay";
};
編譯并測試
修改完成后單獨編譯內核,單獨燒錄kernel-5.10/boot.img包測試即可,然后開始測試。
開啟PWM0節點:
#開啟pwm0節點
echo 0 > sys/class/pwm/pwmchip0/export
#設置頻率為10KHz
echo 10000 > sys/class/pwm/pwmchip0/pwm0/period
#設置占空比為50%
echo 5000 > /sys/class/pwm/pwmchip0/pwm0/duty_cycle
#設置電平方向,默認為inversed
echo normal > /sys/class/pwm/pwmchip0/pwm0/polarity
#使能PWM輸出
echo 1 > /sys/class/pwm/pwmchip0/pwm0/enable
產品簡介
觸覺智能RK3562開發板(型號EVB3562),基于瑞芯微新一代Soc RK3562/RK3562J設計,可用于輕量級人工智能應用。EVB3562開發板配備了PCIe2.1/USB3.0 OTG/千兆網口等各類型接口,支持4G/5G通信、多攝像頭及多種視頻接口,可應用于物聯網網關、平板電腦、智能家居、教育電子、工業顯示、工業控制等行業領域。

搭載瑞芯微新一代RK3562/RK3562J芯片;1TOPS算力NPU,支持INT8/INT16/FP16等數據類型運算;支持4K@30FPS與1080P@60FPS視頻解碼;13M ISP,支持HDR與多路攝像頭視頻采集;單路MIPI-DSI,最高2048 x 1080@60fps ;單通道LVDS,最高1366 x 768@60fps ;三路獨立的以太網口,其中兩路千兆網口,一路百兆網口;支持5G/4G/WiFi/藍牙無線通信;支持Android,Linux操作系統;
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。