電機驅動電路之H橋基本知識---Trinamic電機驅動芯片

H橋是一種電子電路,可使其連接的負載或輸出端兩端電壓反相/電流反向。
這類電路可用于機器人及其它實作場合中直流電動機的順反向控制及轉速控制、步進電機控制(雙極型步進電機還必須要包含兩個H橋的電機控制器),
電能變換中的大部分直流-交流變換器(如逆變器及變頻器)、部分直流-直流變換器(推挽式變換器)等,以及其它的功率電子裝置。
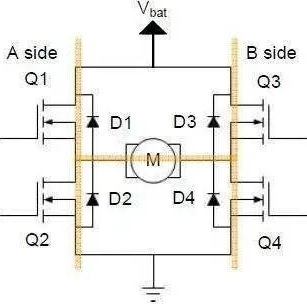
H橋是一個典型的直流電機控制電路,因為它的電路形狀酷似字母H,故得名曰“H橋”。
4個三極管組成H的4條垂直腿,而電機就是H中的橫杠(注意:概述圖中只是簡略示意圖,而不是完整的電路圖,其中三極管的驅動電路沒有畫出來)。

H橋電路中間有一個直流電機M。D1、D2、D3、D4是MOS-FET的續流二極管;
開關狀態
下面以控制一個直流電機為例,對H橋的幾種開關狀態進行簡單的介紹,其中正轉和反轉是人為規定的方向,實際工程中按照實際情況進行劃分即可。
正轉
通常H橋用來驅動感性負載,這里我們來驅動一個直流電機:
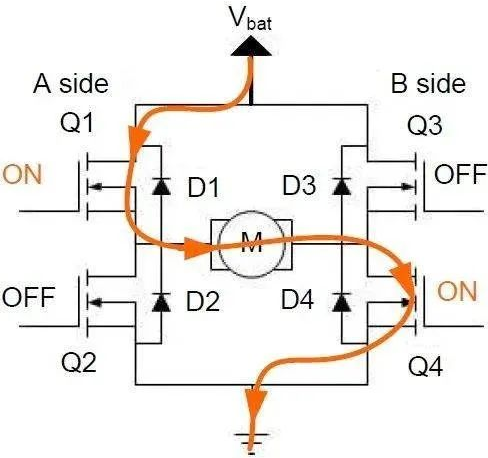
打開Q1和Q4
關閉Q2和Q3
此時假設電機正轉,電流依次經過Q1、M、Q4 ,如下圖中紅色線條所示。
反轉
另外一種狀態則是電機反轉,此時四個開關元器件的狀態如下:
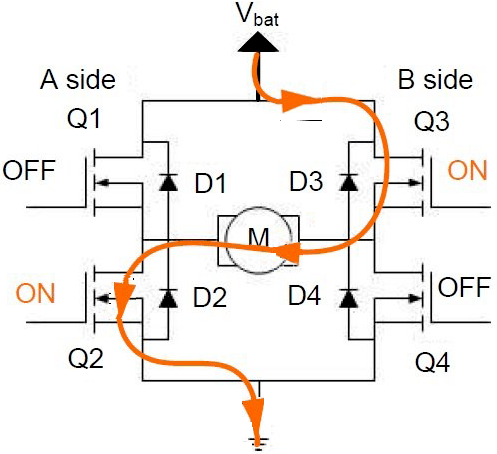
關閉Q1和Q4
打開Q2和Q3
此時電機反轉,電流依次經過Q2、M、Q3 ,如下圖中紅色線條所示。
調速
如果要對直流電機調速,其中的一種方案就是:
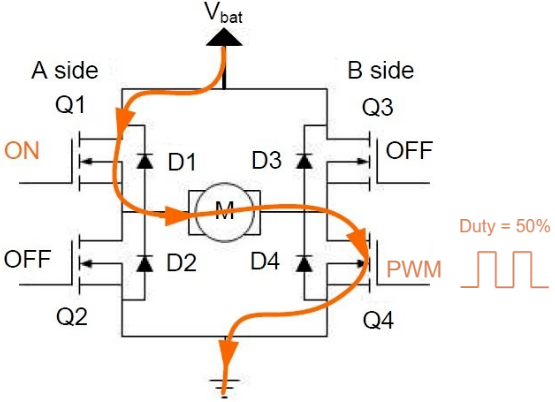
關閉Q2和Q3
打開Q1 ,Q4上給它輸入50%占空比的PWM波形
這樣就達到了降低轉速的效果,如果需要增加轉速,則將輸入PWM的占空比設置為100%,電流方向如下圖中紅色線條所示。
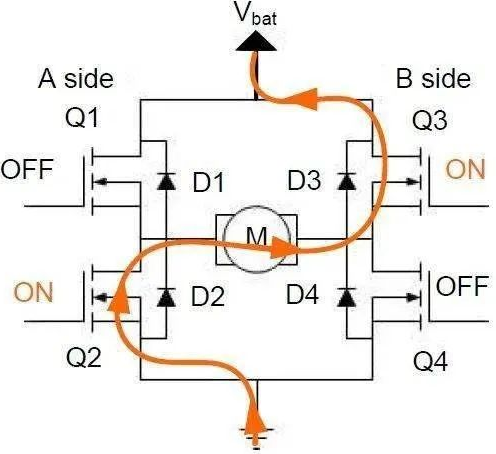
停止狀態
這里以電機從正轉切換到停止狀態為例。
正轉時Q1和Q4是打開狀態,這時候如果關閉Q1和Q4,直流電機內部可以等效成電感,也就是感性負載,電流不會突變,那么電流將繼續保持原來的方向進行流動,這時候我們希望電機里的電流可以快速衰減。
這里有兩種辦法。
第一種:
關閉Q1和Q4,這時候電流仍然會通過反向續流二極管進行流動,此時短暫打開Q1和Q3從而達到快速衰減電流的目的,電流方向如下圖中紅色線條所示。
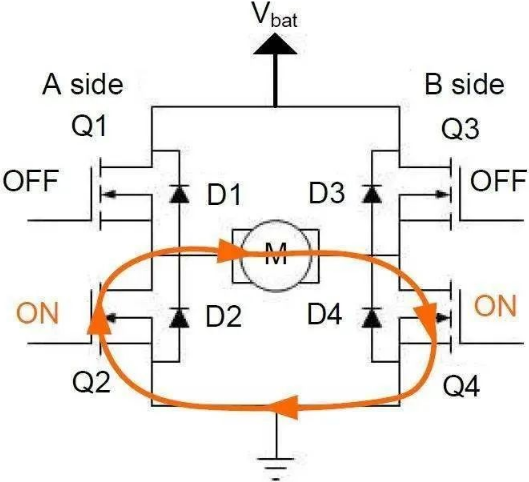
第二種:
準備停止的時候,關閉Q1、打開Q2,這時候電流并不會衰減地很快,電流循環在Q2、M、Q4之間流動,通過MOS-FET的內阻將電能消耗掉。
補充-另外一種H橋電路
上文中是包含4個N型MOS管的H橋,
另外還有包含2個N型、2個P型MOS管的H橋,下圖就是這種H橋電路。
它由2個P型場效應管Q1、Q2與2個N型場效應管Q3、Q4組成,橋臂上的4個場效應管相當于四個開關。

相對于前文4個N型MOS管的H橋電路,此電路的一個優點就是無論控制臂狀態如何(絕不允許懸空狀態),H橋都不會出現“共態導通”(短路)。
MOS管開關電路原理
P型MOS管在柵極為低電平時導通,高電平時關閉。
N型MOS管在柵極為高電平時導通,低電平時關閉。
正轉
場效應管是電壓控制型元件,柵極通過的電流幾乎為“零”。
正因為這個特點,在連接好上圖電路后,控制臂1置高電平(U=VCC)、控制臂2置低電平(U=0)時,Q1、Q4關閉,Q2、Q3導通。
此時,電機左端低電平、右端高電平,所以電流沿箭頭方向流動,設定此時為電機正轉。
下面是Trinamic電機驅動芯片的步進電機系統架構。
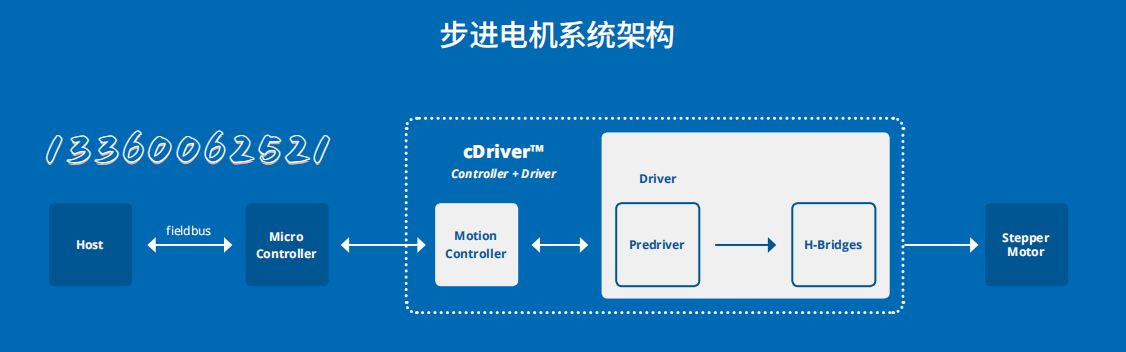
可以看到,芯片集成了預驅,檢測和保護電路。預驅也包含微步相序和分配邏輯。
芯片內部也集成了功率橋來節省外圍器件。
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。






