LabVIEW控制Arduino實現舵機聯控(基礎篇—9)

本篇博文將通過LabVIEW和Arduino Uno控制板實現對單個和多個舵機轉動角度的控制。
1
控制單個舵機
1.1、實驗目的
利用LIAT函數庫通過LabVIEW和Arduino Uno控制板實現對單個舵機轉動角度的控制。
1.2、實驗環境
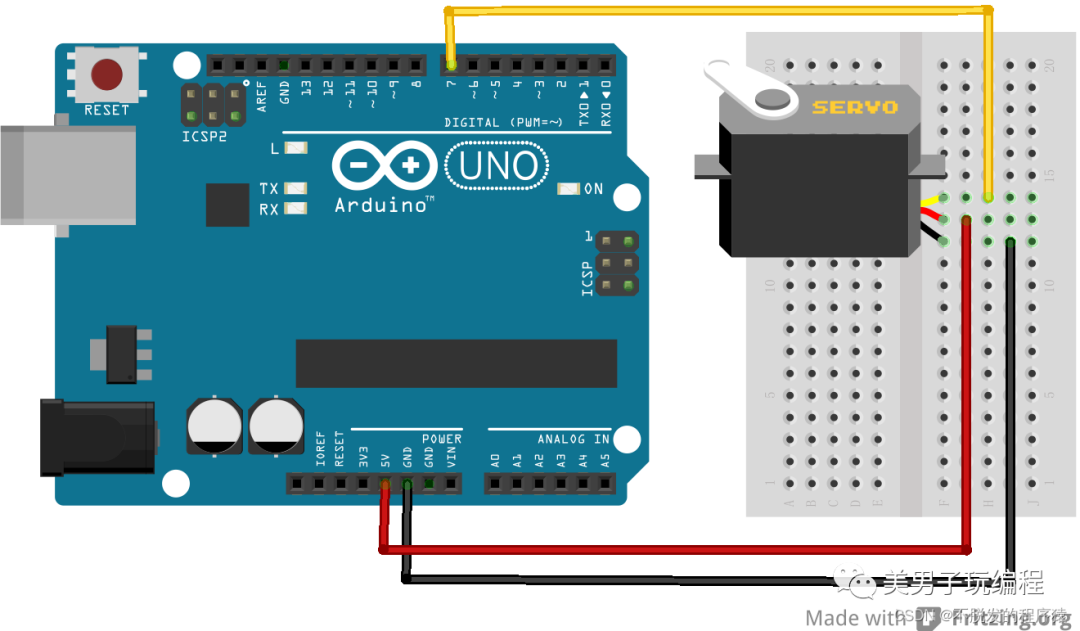
將9g舵機的電源線分別接至Arduino Uno控制板上的5V和GND引腳上,信號線接至數字引腳D2上,如下圖所示:
1.3、程序設計
本例修改自LabVIEW lnterface for Arduino函數庫中的示例,位于函數選板“函數”→"Arduino"→"Example" "Servo Example",修改后的LabVIEW前面板如下圖所示:

程序框圖如下圖所示:
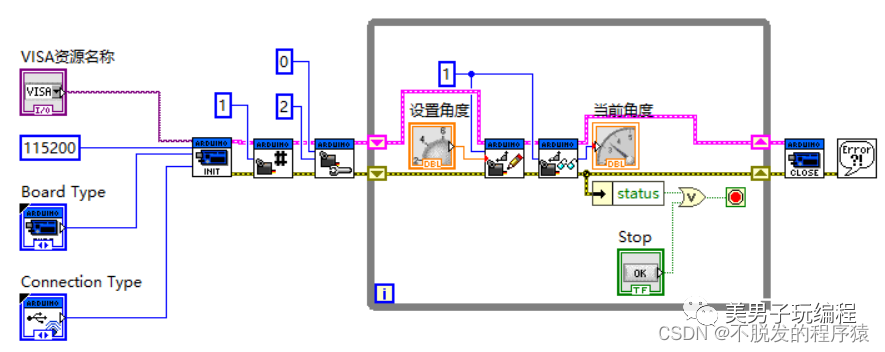
LabVIEW程序首先通過設置的串口號與Arduino Uno控制板建立連接,然后調用Servo函數庫中的Set Number of Servo和Configure Servo函數節點以設置舵機的數目為1和舵機的連接引腳,接著進入While循環并不斷調用Servo Write Angle和Servo Read Angle函數節點先向舵機寫入轉動的角度值,并讀取舵機當前的角度值。最后,斷開與Arduino Uno控制板的連接。
1.4、實驗演示
點擊運行按鈕,LabVIEW程序開始執行,通過調節設置角度的旋鈕,可以看到舵機隨著角度的改變而轉動,同時,當前角度值也隨著舵機的轉動而實時改變。
2
控制多個舵機
2.1、實驗目的
利用LIAT函數庫通過LabVIEW和Arduino Uno控制板實現對多個舵機轉動角度的控制。
2.2、實驗環境
實驗環境和控制單個舵機方法類似,將兩個9g舵機的電源線分別接至Arduino Uno控制板上的5V和GND引腳上,信號線分別接至數字引腳D2和D3上。
2.3、程序設計
本例修改自LabVIEW Ilnterface for Arduino函數庫中的示例,位于函數選板“函數”→"Arduino"→"Example"→"Servo Example",修改后的LabVIEW前面板如下圖所示:

程序框圖如下圖所示:
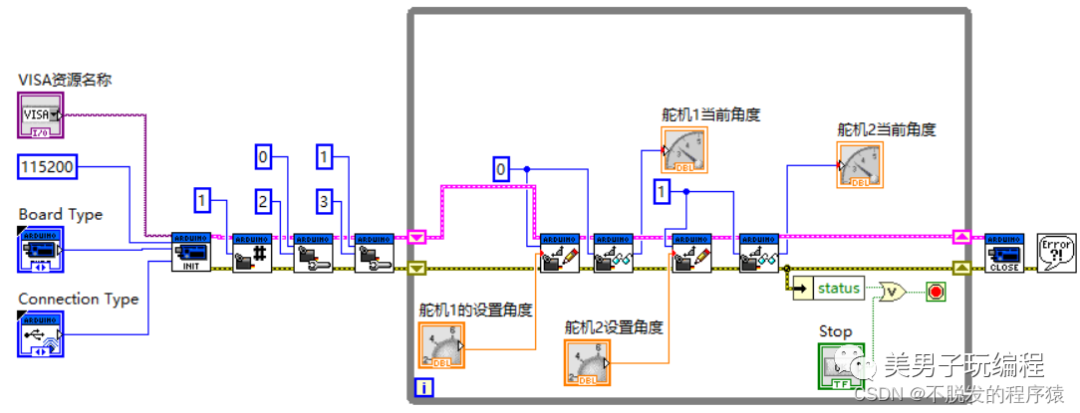
LabVIEW程序首先通過設置的串口號與Arduino Uno控制板建立連接,然后調用Servo函數庫中的Set Number of Servo和Configure Servo函數節點以設置舵機的數目為2和每個舵機所連接的引腳,接著進入While循環并不斷調用Servo Write Angle和Servo Read Angle函數節點向指定舵機寫入轉動的角度值,并讀取出指定舵機當前的角度值。最后,斷開與Arduino Uno控制板的連接。
2.4、實驗演示
點擊運行按鈕,LabVIEW程序開始執行,通過舵機1和舵機2的調節設置角度旋鈕,可以看到舵機1和舵機2隨著角度的改變而轉動,同時,舵機1和舵機2的當前角度值也隨著舵機1和舵機2的轉動而實時改變。
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。










