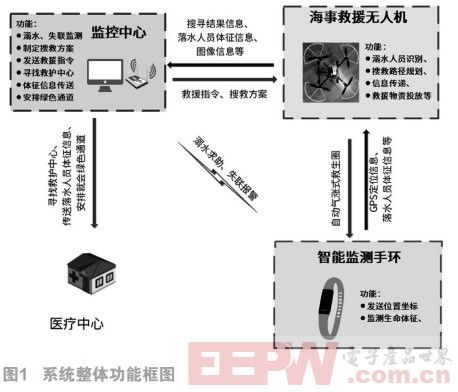
- 介紹了一種基于四旋翼飛行器簡單、快速地搜尋海上落水者的系統。該系統由三部分組成:海事救援無人機、智能可穿戴設備和監控中心。海事救援無人機和智能可穿戴設備均采用Cortex-M4內核的XMC4700處理器。當人員落水時,智能可穿戴設備會不斷向外界發送佩戴者的位置信息和生命體征。海事救援無人機能按照預定軌跡飛行,同時利用機載攝像頭實時搜索落水者并將圖像傳送至監控中心。無人機還能在飛行的過程中不斷搜索附近是否有智能可穿戴設備的信號,若有,則將所得信息發送至監控中心同時飛向該位置并在人的指揮下投擲下救生物品。監控
- 關鍵字:
四旋翼 飛行器 海上搜救 處理器 201901

- [EEPW北京消息]經過參賽選手與評審專家兩天時間的共同協作,6月8日順利評選出第三屆“時代民芯”杯電子設計大賽的各獎項。其中一等獎1名,二等獎2名,三等獎5名。經與會評審專家合議一致認為,因為進入終審階段的18組作品中,均未達到特等獎的要求,因此本次大賽特等獎獎項仍空缺。
- 關鍵字:
時代民芯 導航 MXTOS2-200 四旋翼

- 文中對四旋翼無人機進行建模與控制。在建模時采用機理建模和實驗測試相結合的方法,尤其是對電機和螺旋槳進行了詳細的建模。首先對所建的模型應用PID進行了姿態角的控制。在此基礎上又對各個方向上的速度進行了PlD控制。然后在四旋翼飛機重心進行偏移的情況下進行PID控制,仿真結果表明PID控制律能有效的控制四旋翼無人機在重心偏移情況下的姿態角和速度。最后為了方便控制加入了控制邏輯。
- 關鍵字:
四旋翼 建模 PID 控制 重心偏移 控制邏輯
四旋翼介紹
您好,目前還沒有人創建詞條四旋翼!
歡迎您創建該詞條,闡述對四旋翼的理解,并與今后在此搜索四旋翼的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473