- 這個簡短教程的目的是展示一種獨特的爬墻方法,并展示1自由度機械臂的雙重功能(不包括夾具)技術上是3自由度,因為移動/旋轉機器人框架。規則基本上是這樣的:收集和檢索未知大小/重量的對象電池電量嚴重受限機器人可以遠程控制允許的機器人高度/長度/寬度限制規格該機器人使用一個HS-311伺服機構用于致動儲料斗,一個改進的HS-805BB用于1自由度機械臂,一個伺服機構用于機器人夾持器末端執行器,以及兩個改進的伺服機構用于差速傳動系。鏟斗由彎曲的鋁片金屬制成,框架由鋁原材料銑削和CNCe制成。桶內使用了特殊形狀的泡
- 關鍵字:
爬壁機器人 機械臂

- 這里設計了一個關于避障機器人的簡單項目。機器人學是一個有趣且快速發展的領域。作為工程的一個分支,機器人技術的應用隨著技術的進步而不斷增加。移動機器人的概念正在快速發展,移動機器人的數量和其復雜性隨著不同的應用而增加。有許多類型的移動機器人導航技術,如路徑規劃、自我定位和地圖解釋。避障機器人是一種自主移動機器人,它可以避免與意外的障礙物發生碰撞。在這個項目中,我們設計了一個避障機器人。它是一個基于Arduino的機器人,使用超聲波測距儀傳感器來避免碰撞。電路圖需要的硬件Arduino Uno超聲波測距儀傳感
- 關鍵字:
DIY Arduino 避障 機器人 機械臂

- 設計了以STM32F103C8T6芯片為主控的智能物流機器人,并對機器人系統性能進行分析。電機調速動態指標中調節時間平均為560 ms,超調量平均34.6%。隨著電機轉速增大,調節時間呈減小趨勢。機械臂跟蹤性能在PID控制下表現良好,平均每2.5 s完成跟蹤目標并準確抓取,實物系統有良好的穩定性、可靠性和準確性。
- 關鍵字:
202304 STM32 OpenMV PID 機械臂 物流機器人

- 在這個項目中,我們使用Arduino設計了一個簡單的手勢控制的機器人。這個手勢控制機器人是基于Arduino Nano、MPU6050、射頻發射器-接收器對和L293D電機驅動器。盡管標題說是手勢控制機器人,但從技術上講,這個機器人是由手的傾斜度控制的。前言機器人是一個由計算機程序操作的電子機械系統。機器人可以是自主的或半自主的。自主的機器人不受人類的控制,通過對環境的感知來決定自己的行為。大多數工業機器人是自主的,因為它們需要以高速和高精確度進行操作。但有些應用需要半自主或人類控制的機器人。一些最常用的
- 關鍵字:
DIY Arduino 射頻 電機驅動 機器人 機械臂

- 在這個項目中,我將向你展示如何使用Android手機建立一個Arduino和藍牙控制的機器人手臂。這個機械臂既可以在手動模式下操作,也可以在全自動模式下編程操作。你們已經在Electronics Hub看到了一個機械臂項目,我們從廢品中獲得了一切(除了電機和Arduino)。我們從你們那里得到了非常好的反應,在此基礎上,我們決定做一個更好的版本,如果我必須說,是2.0版。這個DIY Arduino和藍牙機器人手臂項目是通過藍牙通信的安卓手機操作的。我們已經為安卓手機開發了一個應用程序,你可以用它來控制機械
- 關鍵字:
DIY Arduino 藍牙 機器人 機械臂
- 航天員聶海勝、劉伯明和湯洪波先后進入天和核心艙,標志著中國人首次進入自己的空間站。 “天和”核心艙由生活控制艙、資源艙、節點艙三個部分構成,在太空為宇航員和科學家提供居住和科研環境。 引人矚目的是,“天和”核心艙外的一對大型機械臂,為我國首個具有七個自由度的機械臂,從而在太空可以實現類似人類手臂的運動能力。 七個自由度意味著什么?21所專家說,這是對人類手臂的最真實還原,是我國目前智能程度最高、難度最大、系統最復雜的空間智能制造系統,最大承載能力25噸。 核心艙機械臂通過末端執行器與目標適配器
- 關鍵字:
機械臂 中國空間站
- 本設計通過以MIPS構架的PIC32單片機實現對仿生六足機器人基本步態控制,使機器人可按照典型步態協調靈活運動。該六足機器人前進一步的最大距離是8CM 。一次拐彎的最大角度為30度。機械臂夾起來的重物最重為150g左右。無線攝像頭數據傳輸的最遠距離達到200米以上。
- 關鍵字:
六足仿生機器人 MIPS構架 PIC單片機 無線控制 機械臂
- 本機器人取名為大白菜,是一個具有5個自由度的機器人,其中3個有電機拖動,能夠實現擊鼓的功能。機械臂本體由鋁合金制作,底座由有機玻璃制作,控制電路分為主控制電路與子控制電路,主控制電路為單片機開發板PIC及其配套系統,子控制電路為聲音與觸感示教系統。機器人由整體電路及PIC控制,通過離線編程設計可以根據預先設定的程序擊鼓,通過示教系統設計可
- 關鍵字:
擊鼓機器人 機械臂 聲音傳感器 觸碰開關 PIC
- 北京時間1月2日早間消息,據美國探索頻道28日報道,1945年,亞瑟-克拉克在《無線電世界》雜志發表了一篇具有歷史意義的文章,詳細闡述當前所有人都在使用的地球同步通訊衛星。這種衛星被他稱之為“克拉克軌道”。在科幻小說中,艾薩克-阿西莫夫曾多次刻畫類人機器人。現在,這種機器人在先進實驗室已經非常普遍。克拉克和阿西莫夫的例子無疑是在告訴我們,隨著科學技術的進步,很多一度被認為科幻的東西最終都成為現實。以下盤點的是科學家在2012年取得的一系列重大科研成就。
1.仿生假肢
- 關鍵字:
無線電 機械臂
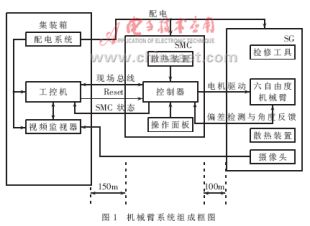
- 蒸汽發生器(Steam Generator)是核動力裝置中一、二回路之間的連接樞紐,也是核動力裝置運行中發生故障最多的設備之一。蒸汽發生器的故障大多是由于各種腐蝕使傳熱管或管與管板接頭處發生泄漏,從而影響動力裝置的安全運行。由于蒸汽發生器中存在放射性物質,當發生泄漏時,人不能進入其中進行維修,這時就需要機械臂代替人完成維修工作。機械臂檢修系統即通過六自由度機械臂對蒸汽發生器內部進行檢修和維護。該機械臂有六個關節,六軸聯動;主要用于蒸汽發生器(SG)一回路側檢修活動。機械臂的手端裝有適配器,可以攜掛不同
- 關鍵字:
工控機 機械臂 蒸汽發生器 監控
機械臂介紹
您好,目前還沒有人創建詞條機械臂!
歡迎您創建該詞條,闡述對機械臂的理解,并與今后在此搜索機械臂的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473