車載雷達機電式自動調平系統的方案

現代戰爭對雷達機動性能的要求越來越高,特別是機動陸面載體如車載雷達天線、發射架等設備,到達預定位置后,要求快速架設精確的水平基準。車載平臺的人工手動調平已很難滿足軍方對雷達快速架設、快速撤收,以及平臺高精度調平的要求。機電式自動調平與人工調平相比具有調平時間短、調平精度高、可靠性高等特點。本設計是以單片機和CPLD為控制核心,伺服控制器和伺服電機為執行單元的機電式四點支撐自動調平隨動控制系統,能夠實現機電式車載平臺自動調平的全自動化、全閉環控制。其優點在于調平時間短(少于3分鐘)、調平精度高(小于3’)、可靠性高、可在惡劣環境下工作等方面。
本文引用地址:http://www.j9360.com/article/99726.htm系統組成
調平原理
調平方式通常有3點式或4點式,特殊的還有多點式如6腿或更多腿平臺。本系統根據實際的應用情況,采用4點式調平方式。四點支撐的工作平臺X 軸、Y 軸是根據水平傳感器的安裝位置確定工作平臺面上互相垂直的兩個軸向,調平原理如圖1所示。
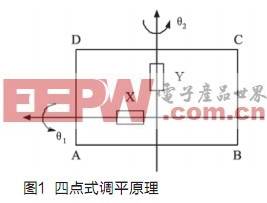
在工作平臺的支撐腿著地后, 控制系統開始進行調平。通過水平傳感器的檢測信號,可以找出工作平臺的最高點。將水平傳感器按如圖1 所示方向安置于工作平臺上,傳感器輸出含有X 和Y 軸信號,它們是與水平誤差(角度) 成線性關系的數字信號。當X>0,Y<0時,撐腿A為最高點;X<0,Y<0時,撐腿B為最高點;X<0,Y>0時,撐腿C為最高點;X>0,Y >0 時,撐腿D為最高點。
假設撐腿著地后撐腿A為最高點(其他撐腿為最高點的情況相似),根據水平傳感器的信號,可以分別進行X軸和Y軸方向的調節。如先進行X軸調節,其過程如下:撐腿A和D不動,撐腿B和C同時上升一定位移,即工作平臺繞撐腿A和D為軸線旋轉,撐腿B和C同時上升,上升的數值由控制系統根據水平傳感器的X軸反饋值決定,直至X軸呈水平狀態。Y軸調節與X軸類似。若工作臺的X軸和Y軸調節成水平狀態,則可認為工作臺已處于水平狀態。4點調平的水平誤差為q2=q12+q22,q1和q2分別為水平傳感器的角度精度。若兩個傳感器的控制精度都為δ時,則水平誤差。

伺服電機相關文章:伺服電機工作原理


評論