基于攝像頭的賽道信息處理和控制策略實現
作者:上海交通大學電子系 胡晨暉 上海交通大學機械設計與自動化研究所 賈秀江 上海交通大學 自動化系 方興
時間:2009-06-22
來源:
收藏
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
在去年的Freescale全國大學生智能車大賽中,賽道信息檢測方案總體上有兩大類:光電傳感器方案和攝像頭方案。前者電路設計簡單、信息檢測頻率高,但檢測范圍、精度有限且能耗較大;后者獲取的賽道信息豐富,但電路設計和軟件處理較復雜,且信息更新速度較慢。在比較了兩種方案的特點并實際測試后,我們選擇了攝像頭方案。本文將在獲得攝像頭采集數據的前提下,討論如何對數據進行處理和控制策略的實現。
本文引用地址:http://www.j9360.com/article/95521.htm數據采集
我們選擇了一款1/3?OmniVision?CMOS攝像頭,用LM1881進行信號分離,結合AD采樣,實現了視頻信號的采集。在總線周期為32M的情況下,每行最多能夠采集80個點,其中前14個數據為行消影,第15到第80個點為有效數據點(見圖1)。
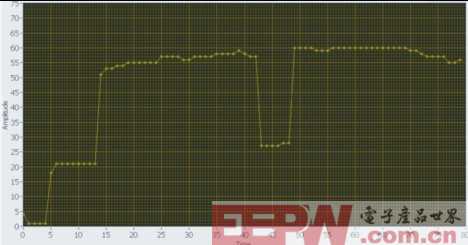
圖1 單行80點:前0~13點為行消影、凹槽為黑線所處位置
攝像頭每場信號有320行,其中第23到310行為視頻信號。我們從中均勻采集了12行,最后得到一個12×80的二維數組。











評論