FPGA在彈上信息處理機中的應用

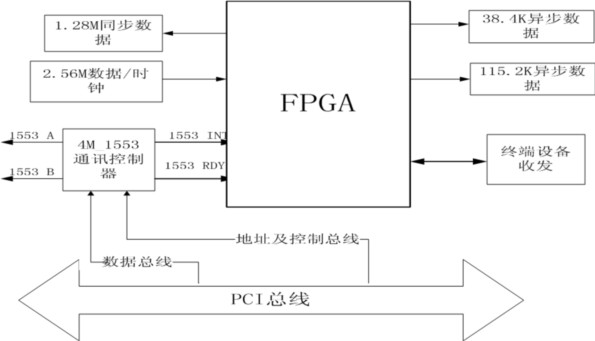
圖2 地面單元測試儀框圖
系統實現
信息處理機的系統工作流程見圖3,具體包括:
(1)上電復位及初始化
上電后,FPGA和ARM同時復位,進行初始化過程,其中FPGA初始化中, FPGA內部寄存器和邏輯狀態的初始值、內部緩沖區數據清零依靠復位信號來完成,其中的“FPGA參數設定”由監控程序負責執行或由FPGA使用缺省參數完成。
如果上電或復位時出現問題,FPGA使用缺省參數自動初始化所有參數并自動進行后續工作。
(2)20ms緩沖區切換信號同步
完成初始化后,FPGA內部的“20ms緩沖區切換信號”生成邏輯,自動執行和“1.28M同步輸入串口”的同步過程,同步過程中不向外發送任何數據,一旦同步后,會給出同步鎖定信號Sync Locked=“1”,所有通道的數據采集工作均開始,進入遙測信息接收過程。
(3)遙測信息接收
通道的數據采集都以FPGA內部產生的“20ms緩沖區切換信號SwitchBuf”為20ms周期標志進行緩沖區的切換(雙端口),分別為A,B兩個緩沖區。
1.28M通道在20ms內應完成32x100=3200 Bytes的數據接收。并根據字計數器反轉當前的SwitchBuf信號。
4M 1553B通道應由ARM完成4M 1553B總線遙測數據的接收、過濾、打包,形成20ms內約1500 Bytes的遙測數據包填入分配給它的包緩沖區,由FPGA自動生成對應的包長度信息放入一個包長度FIFO中。此后,ARM重新開始下一20ms數據接收工作,,如此反復循環下去。組幀狀態機(MFSTM)在組幀過程中,一旦發現包長度FIFO不空,就從包緩沖區FIFO中讀取對應長度的數據包,按照規定格式和位置填入數據融合表。










評論