基于超聲波的定位系統研究與實現

傳感器技術、微機電系統、現代網絡和無線電通信等技術的進步,推動了無線傳感器網絡的產生和發展。無線傳感器網絡具有廣闊的應用前景,能應用于軍事國防、工農業控制、城市管理、生物醫療、環境定位、搶險救災、危險區域遠程控制等諸多領域。
超聲波定位的原理與無線電定位系統相仿,只是由于超聲波在空氣中的衰減較大,只適用于較小的范圍。超聲波在空氣中的傳播距離一般只有幾十米。短距離的超聲波測距系統已經在實際中應用,測距精度為厘米級。超聲波定位系統可用于無人車間等場所中的移動物體定位。
1 超聲檢測原理
1.1 回波信號
超聲檢測信號分析系統的原理是通過超聲檢測儀和信號采樣裝置及計算機的相互協調,實現超聲檢測電信號的模數轉換,并完成檢測數據的存儲,計算機根據己量化的回波信號數據,利用有關理論及技術作相應處理。超聲檢測是一種物理手段,利用超聲波的性質來判斷目標的距離。是根據超聲波在檢測區域內運動時遇到界面反射所呈現的特征來判斷物體位置狀況的無損檢測方法。
超聲波檢測中常用技術是把超聲波短脈沖發送至被測物體,當聲波自物體的非連續性結構或邊界返回時,獲取其回波波形。當波觸及物體前壁面時,有幾個振蕩周期的窄帶隨機波產生,稱為始波,與此同時,還有一部分超聲波滲入被測物體,觸及物體的后壁面,又可得到振蕩的回波,稱為底波。利用始底波之間的時間間隔與己知的聲波在物體中的速度,便可算出物體的距離。同樣,當聲波觸及被測物體內的氣孔、雜質等非連續性目標位置時,也會產生回波,據此得出目標位置的信息,如目標位置在檢測區域內的大致位置性質等。
1.2 模型的建立
超聲波檢測中所處理的是振蕩波,具有窄帶隨機信號的特性。傳統的超聲波檢測設備采取硬件檢波的方法提取回波包絡,檢測精度和主峰位置的精確定位都無法保證。由于目標回波位置直接決定了測量精度,尤其對運動目標,如何精確測定出回波位置是技術的關鍵所在。本文介紹的信號采集系統包括傳感器信號采集設計及傳感器與MOTE之間信息傳遞的硬件設計與構造。超聲波傳感器的特點是其方向性好且可以達到厘米級定位精度,在一些要求較高的定位系統如DPEG及Crickets都是采用基于超聲波傳感器的測距方式。
超聲波傳感器的工作原理是:信號時間在零時刻發出一束聲波,假設傳感器在經過時間t后接收到返回的超聲波,根據公式s=vt,取值v為34000cm/s,實際中的超聲波發射時間單位是毫秒(mm),換算后為10-6s,則
![]()
根據此公式可求得距離值s,其中值與傳感器的定時器有關,是一個與硬件設備關系密切的采樣值。在系統中,假設超聲波傳感器的定時器為16位,則216=65536,65536/58=1129,即能夠定位的范圍在11H左右。我們在實際中發現采集到的數據與實際的距離還存在一個線性關系,利用16位的定時器能夠探測的距離僅在1.46m之內,這對于目標定位系統是災難性的限制。對此采用降低時間精度來提高超聲波的工作范圍,把時間精度降低為原來的1/3,則實際的探測范圍相應提高到原來的3倍,達到4.8m。經過實際檢驗,證明該設計可以實現且有良好準確的測距效果。
2 系統的組成
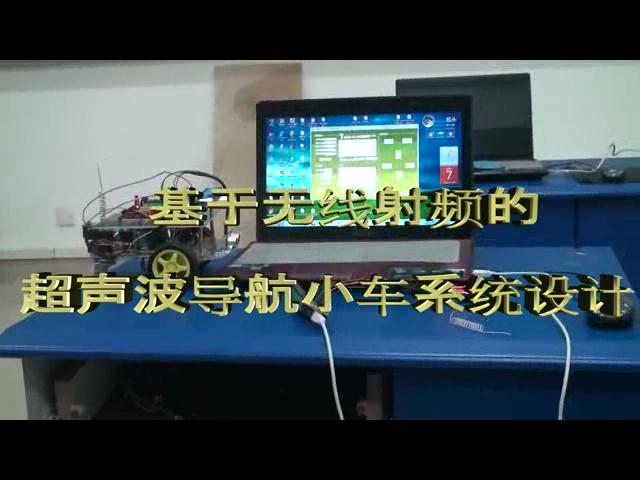
系統由超聲波傳感器、節點網關、無線網絡、筆記本和線遙控玩具小汽車組成。如圖1所示。

無線傳感器網絡的數據通過網關傳人計算機,服務程序解析數據內容并進行處理,一部分內容于事件歸類后存入數據陣,用作分析查詢。另一部分內容僅用于不同傳感器之間的數據融和,即不同傳感器的自身位置信皂在進行通信控制之后,由傳感器節點將其丟棄,因為傳感器節點的存儲空間和能量有限,大量的數據存儲不僅會浪費空間,而且會耗費電池。數據庫根據需要可以選擇數據進行位置估算,然后再對風向、障礙物、地面高低起伏等影響因素進行參數修正,確定目標在檢測區域內的位置信息。后臺系統通過無線網關與無線傳感器實現聯絡。另外這些消息需通知負責用戶界面部分的程序模塊,以可視化的力式顯示定位到的內容。
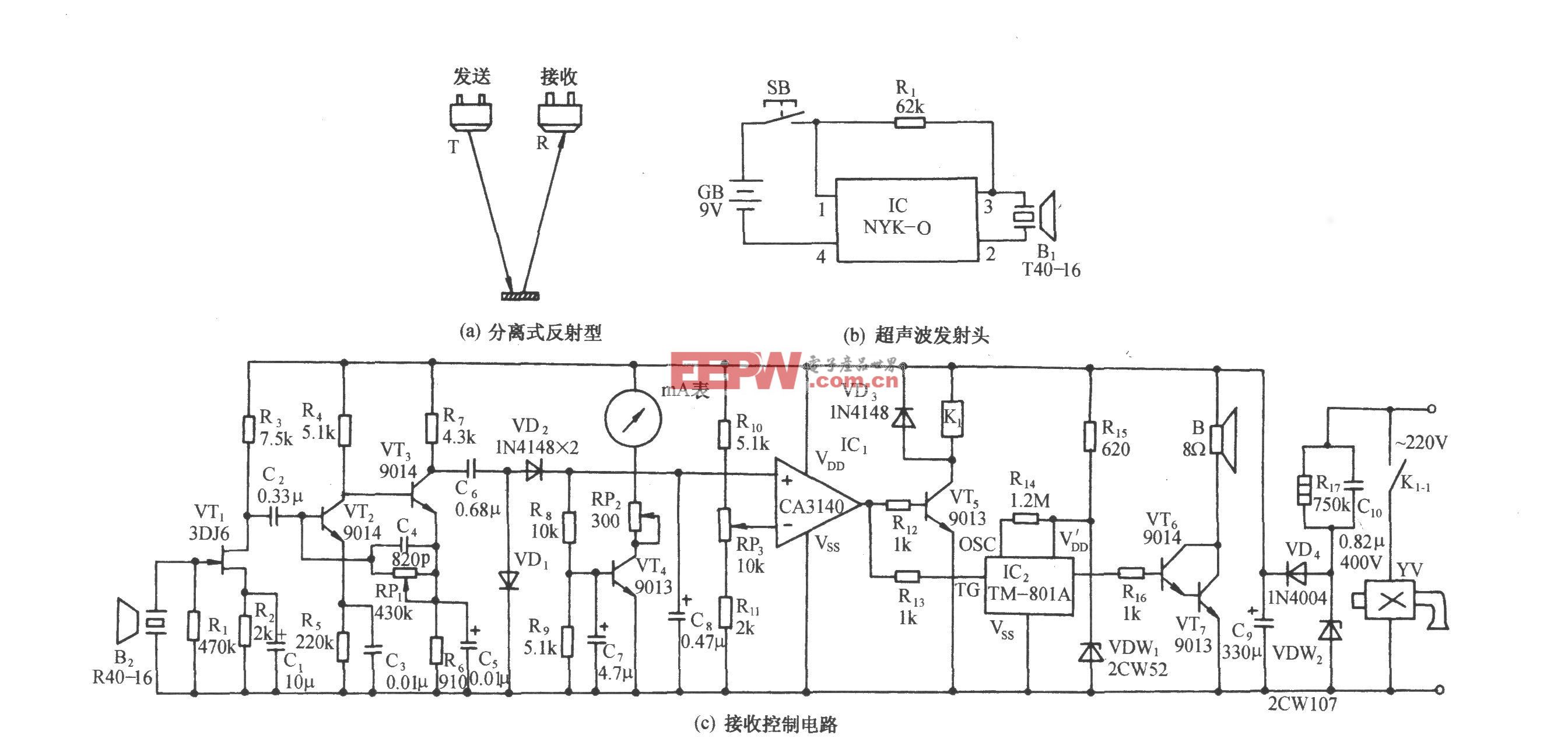
超聲波定位系統在具體實現上與無線電定位有所不同。不同發射點的無線電信號可以用不同的頻率來區分,而超聲波系統難以做到,因此必須有一種能夠把各個發射點的超聲波信號區分開來的方法。我們采用帶地址編碼的無線電觸發電路分別觸發各個發射點。
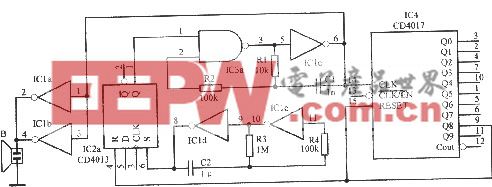
以發射點固定、主體接收的超聲波定位系統為例。主體部分由微處理機電路、超聲波接收電路和無線電編碼觸發電路組成;發射點部分由超聲波發射電路和無線電編碼接收電路組成。系統的工作過程首先由微處理機選定要觸發的發射點地址,啟動發射電路并開始計時,在給定時間內如果接收到信號則由延遲時間計算出主體到發射點的距離。與超聲波相比,無線電波的傳輸時間可忽略不計;如果在給定時間內沒有接收到信號,則認為主體到發射點的距離已超過可接收距離。當接收到足夠的發射點信號后,可由主體到各個發射點的距離計算出主體的位置坐標。由于超聲波在空氣中的傳播速度隨著環境條件的不同而變化,為了提高測量精度,還需要對測量結果進行校正。
MICA2與超聲波傳感器通過—個51陣的接口相連接,超聲波傳感器電源通過外接電池組實現供電。MICA2的數據處理單元采甩Atmel公司的Atmega128L微控制器,它采用低功耗CMOST工藝生產的基于RISC結構的8位微控制器,是目前AVR系列中功能最強大的單片機。AVR核將32個工作寄存器和指令集聯結在—起,所有的工作寄存器都與ALU直接相連,實現在—個時鐘周期內執行單條指令的同時訪問兩個獨立寄存器的操作,這種結構提高了代碼效率,在性能上比普通單片機提高約10倍。Atmega128L具有豐富的資源和較低功耗。片內有128KB的程序Flash、4KB的數據SRAM、可外擴到64KB的E2PROM。此外,還有8個10位ADC通道、2個8位和2個16位硬件定時/計數器,并可在多種不同的模式下工作;8個PWM通道、可編程看門狗定時器和片上振蕩器、片上模擬比較器UART、SPI、I2C總線接口;JTAG接口除了正常操作模式外,還具有6種不同等級的低功耗操作模式,每種模式具有不同的功耗。MICA2的數據傳輸單元模塊由Chipson公司生產的低功耗、短距離的符合ZigBee技術的高集成度工業用射頻收發器件的無線通信模塊CC2420組成。節點的MAC層和PHY層協議符合802.15.4規范,MAC層采用的是基于ESMA-CA的機制,該芯片只需極少外部元器件,可確保短距離通信的有效性和可靠性。數據傳輸單元模塊支持數據傳輸率高達250kbit/s,可以實現多點對多點的快速組網,系統體積小、成本低、功耗小,適于電池長期供電,具有硬件加密、安全可靠、組網靈活、抗毀性強等特點。









評論