基于MMA7260QT三軸加速度傳感器的跌倒探測儀的研制

引言
本文引用地址:http://www.j9360.com/article/86529.htm跌倒探測儀適用于自理能力和自我保護能力比較差的老年人和兒童,它通過測量佩戴該儀器的個體在運動過程中的三個正交方向上的加速度來感知其身體姿態的變化,并可按照需要進行報警和發布。
跌倒探測儀由加速度傳感器、數據處理模塊、電源和通信模塊構成。其中傳感器測量對象的加速度矢量;處理器模塊負責采集加速度傳感器的數據,分析判斷對象的身體姿態并控制報警及報警信息的發布;電源模塊負責為整個系統提供電力供給;通信模塊負責將報警信息通過一定的協議進行發布。
關鍵技術
人體運動模型的建立
在姿態轉變過程中,重力將成為影響這一運動過程的主要因素。跌倒過程中,對象的加速度、速度和位移三種矢量均發生了變化。
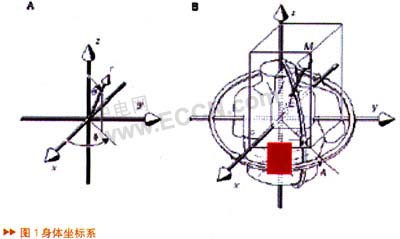
如圖1建立直角坐標系,X、Y、Z軸相互正交,任意空間方向上的矢量變化均可以分解成X、Y、Z三個方向上的分量變化。使用者正確佩戴跌倒探測器且處于靜止或水平勻速運動狀態下,Z軸方向的加速度為重力加速度(g),其他兩個方向上加速度為0。當佩戴者跌倒時,如果僅考慮初始狀態和最終狀態就可以發現,理想情況下Z軸分量發生從最大值(1g)變化為0,而X或Y軸的分量則從0變化為最大(1g),具體是X軸還是Y軸發生這一變化,則由佩戴者跌倒后的姿態決定--平臥為X軸變化,側臥為Y軸變化。如果身體姿態介于平臥和側臥之間,則X軸和Y軸的加速度分量將滿足sqrt{x^{2}+y^{2}}=1g(站立情況下這個矢量和為0),仍然能夠通過計算分析得出與站立不同的加速度分布。
但是在實際情況中,僅根據加速度分量的改變很難分辨臥倒姿態的形成原因,容易出現很多假陽性(檢測到跌倒而實際沒有跌倒)或假陰性(未檢測到跌倒而實際出現跌倒)。因此,需要算法作進一步改進。一般來說,假陽性情況可以通過對加速度在時間域進行一次積分求速度、兩次積分求位移的方式,全方位分析佩戴者身體姿態變化加以篩選;而假陰性情況除采用上面的全面姿態分析外,還需要佩戴者自主參與才能有效提高檢出效率。因此,建立人體跌倒過程的運動模型,提取跌倒過程中身體姿態變化的特征參數是準確檢測跌倒并發布報警信息的關鍵。
無線通信及空間定位信息獲取
跌倒報警必須及時送達救助中心才能夠保證救助的有效性,報警信息的及時發布要求包含兩層含意:其一是報警信息不會因為跌倒探測器佩戴者的行動和所處的位置受到影響;其二,發布的報警信息中應該包括佩戴者跌倒的地理位置內容,這樣才能保證跌倒者得到有效救助。
采用無線通信的方式發布跌倒報警信息非常適合能夠自由行動的配戴者,無線通信技術從技術成熟度、運行成本角度也都非常適用。從技術實現和成本方面考慮,選擇CDMA通信方式更加適合跌倒探測器設計目的的實現。
系統方案設計
需求分析
身體姿態監測
通過三軸加速度傳感器的測量值,利用相應算法計算出佩戴者的身體姿態。當出現跌倒動作時,能夠觸發MCU中斷處理。
報警控制機制
使用者可根據自己的身體狀況選擇是否報警,當使用者已無法控制自己行為時,本產品應能夠保證自動實施報警。
計步器
在一般佩戴過程中,用戶可使用該項功能,為自己的步行健身活動提供量化的參考信息。
空間定位
在實施跌倒報警時,應為報警信息接受方提供報警地點的空間定位信息,保證有效救助及時到達。
無線通訊
能夠將報警和定位信息通過無線方式傳輸到相關人員處。
供電采用鋰電池
部分信息顯示使用液晶屏
系統架構設計
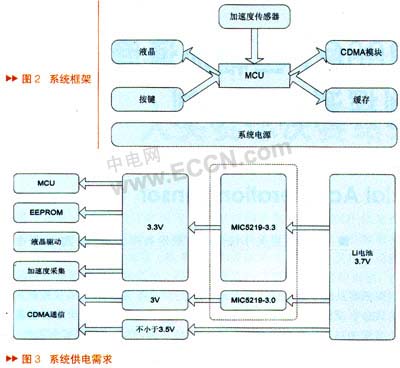
根據跌倒探測器的需求分析,具體的實現方案設計采用如圖2所示的架構。該架構基于高性能、低功耗MCU--MC9S08QG8,通過獲取加速度傳感器的采集信息,經分析和計算后實現跌倒探測及報警等多項功能。
硬件設計
硬件設計圍繞MCU展開,產品采用MC9S08QG8芯片,如何充分利用芯片資源,妥善完成產品的各項任務處理,是設計的關鍵。參考系統結構框架,根據功能模塊劃分,系統的硬件設計詳細描述如下:
加速度采集電路
加速度采集使用MMA7260QT,該芯片輸出為模擬信號,需進行A/D轉換后才能進行數據處理。MC9S08QG8芯片的PA腳為復用通道,可根據需要設置為I/O、鍵盤中斷或A/D采樣通道。本設計將利用MC9S08QG8芯片內部的A/D模塊實現模數轉換,具體實現中采用PA0、PA1和PA2作為三軸加速度的采集通道,與MMA7260QT的Xout(Pin15)、Yout(Pin14)和Zout(Pin13)相連,A/D采樣的控制時鐘通過軟件配置MC9S08QG8相應控制寄存器完成。
MCU外圍電路
本設計中,MCU外圍電路包括電源與時鐘、數據緩存和按鍵電路三部分構成,下面分別描述。
電源與時鐘
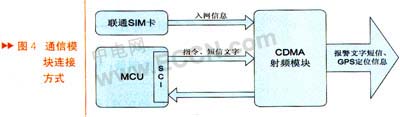
功能組件包括MCU、液晶、按鍵、采集、數據存儲和通信幾部分。根據所選用器件的數據手冊,各組件對供電要求如圖3所示。
從圖中可以看出,整個系統設計要求電源參數有三種,分別為3V、3.3V和3.7V。其中,主要數字電路部分--包括MCU及其外圍電路部分要求提供3.3V的工作電壓;而在無線通信模塊中,針對讀取入網SIM卡部分電路要求3V的供電電壓,CDMA射頻部分工作電壓要求不低于3.5V。
在實際設計中,輸出電壓為3.7V,由于能夠滿足CDMA射頻模塊的工作要求,故直接使用Li電池的輸出供電;聯通入網SIM卡信息讀取電路的工作電壓為3V,設計中采用MICREL公司的MIC5219-3.0芯片執行電壓轉換工作;其他數字電路部分的工作電壓為3.3V,設計中采用MICREL公司的MIC5219-3.3芯片實現這一轉換,參見圖3中虛線框中的內容。
MC9S08QG8自帶時鐘模塊(ICS),為了降低功耗和簡化設計,本系統通過軟件設置相應的控制寄存器實現系統時鐘的上電穩定工作,故在硬件電路設計中不需作過多的考慮。
存儲器
有效的數據緩存要求至少具有320點(合1920字節)的存儲深度。 在本設計中,采用Holtek公司的HT24LC16串行EEPROM作為數據緩存。該芯片采用I2C通訊接口,存儲深度2K字節,數據讀寫速度在微妙量級,能夠滿足數據實時寫入的要求。數據寫滿后,MCU自動將地址重置,從首地址開始覆蓋寫入新的數據。
由于MC9S08QG8內部配有I2C控制模塊,故只需將該模塊對應管腳與EEPROM連接即可--使用PB6(Pin5)和PB7(Pin6)與EEPROM連接。
按鍵電路
報警確認、報警取消、計步器啟動、計步器暫停、計數清零以及無線通信中接受方號碼的設置,都要求跌倒探測器具有用戶輸入的接口,設計中采用按鍵實現。按鍵的接法和使用較為簡單,直接利用MCU的輸入輸出管腳即可,本設計采用Pin1和Pin13。
液晶顯示
本設計采用5位7段碼液晶屏,計步器顯示計數和報警接受方電話號碼輸入都是通過該液晶屏提供給使用者確認。液晶屏的控制管腳為24個,由于MCU全部管腳座位液晶控制也無法滿足工作需求,故在本設計中采用Holtek公司的HT1621B液晶驅動芯片完成從MCU到液晶屏顯示數據的管理和驅動。另外,HT1621B芯片還具有蜂鳴器控制和驅動能力,在本設計中,集成蜂鳴器作為現場報警提示將有助于提高跌倒探測器報警的針對性和準確性,將通過在HT1621B的BZ管腳連接一蜂鳴器得以實現。
HT1621B為I2C接口,MCU可通過內部I2C控制模塊傳輸指令和數據給該芯片。由于本系統采用的EEPROM也是使用I2C接口,針對不同器件的數據傳輸和控制指令將通過地址選擇加以實現。
通信模塊
本設計采用AnyData公司的DTGS-800b型OEM模塊。該模塊符合CDMA:IS-95 A/B、IS-98A、IS-126、IS-637A、IS-707A以及IS-2000等標準協議,能夠提供最高153.6K的數據通訊速率,工作電壓3.6V~4.4V,外形尺寸為53*33*2.7mm,總重量為15g,提供外部通訊接口包括RS-232s、Digital/Analog Audios、LCD、Keypad、Ringer External Reset Control、R-UIM、MP3、MIDI、GPIOs和USB。另外該模塊可收發短信、集成GpsOne技術,無須添加其他組件即可得到地理定位信息,且廠家技術支持非常完善,其各項功能配置非常適合跌倒探測器的需求描述。
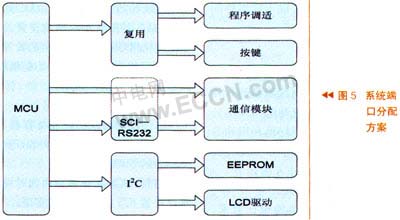
具體實現中,CDMA模塊要求配套入網SIM卡,模塊各項功能可由MCU通過RS232接口以AT命令的方式加以調用。本設計中通信模塊的設計如圖4所示。
MC9S08QG8的SCI外設接口經TTL-RS232轉換后,與DTGS-800b的RS232端口相連,用以向該模塊發AT命令。由于該模塊要求7信號的RS232接口,而MCU自帶SCI不提供該種通信方式,故在系統設計中采用I/O口進行軟件模擬其他的控制信號:CTS、RFR和DTR。DTGS-800b模塊通過SIM卡讀卡電路與SIM卡相連,內部自帶處理器根據需要讀取SIM卡信息,完成CDMA的入網和通信信息的交換。
端口分配
由于本設計采用MC9S08QG8單片機僅能提供最多14個I/O端口,根本無法滿足控制整個系統運行的信號數量要求,故在進行具體設計時,對各管腳的使用和分配進行了專門的部署,如圖5所示。
程序調試和燒入需要兩個端口,但完成調試和燒寫操作后,這兩個端口可以作為標準的I/O使用,故在設計中將其中一個I/O(Pin1)作為按鍵的輸入,實現了端口的復用。
CDMA組件與MCU的通訊要求
通過7信號RS232接口,而MC9S08QG8的SCI模塊僅有TXD和RXD兩個信號,在設計中采用標準I/O通過軟件模擬的方式實現其它所需信號,包括DTR、CTS、RFR。
EEPROM和液晶驅動組件的存取采用I2C接口,本設計中將使用MC9S08QG8的I2C模塊進行硬件控制,通過地址選擇實現不同組件間的切換。
軟件設計
軟件設計是系統各項功能具體實現的關鍵。在跌倒探測器的軟件設計中,由實線系統功能引發的處理內容較多,為了更好地利用和分配MCU的資源,采用了事務處理和狀態機相結合的設計方法。
蜂鳴器相關文章:蜂鳴器原理






評論