基于虛擬儀器的運行環境仿真系統

前言
本文引用地址:http://www.j9360.com/article/80386.htm現代工業面對越來越多的挑戰:激烈的市場競爭和環境保護方面政府的嚴格約束。針對這些挑戰的主要策略是減少新產品的設計和測試時間,減少開發費用,減少產品投入市場的周期。解決這些問題的方法主要是產品開發和過程設計中CAD/CAE/CAM技術的有效利用。在兩個最困擾機電產品設計和開發人員的主要問題中,第一是如何合理選擇部件和子系統以滿足系統需求,第二是如何在低成本條件下測試系統性能。仿真技術則成為了解決上述問題的答案。
過去,仿真技術的研究主要集中于仿真工具方面,而對于現代機電系統,則相對忽略了仿真模型的精度和功能準確度。不管仿真工具如何先進,不合適的仿真模型肯定會導致錯誤的仿真結果。這是現代仿真技術面對的主要問題。
虛擬儀器技術使用主流計算機技術,并結合了創新、靈活的軟件模塊,高性能的硬件技術創造了強大的以計算機為基礎的儀器解決方法。NI發布了一整套軟、硬件工具用于建立測控應用。他們為仿真系統和仿真模型的開發提供了一個良好的基礎。
運行環境仿真系統的研究首先集中于仿真模型,精確建立一個針對機電部件和系統的動態案例仿真模型庫。這個動態仿真模型庫具有三個優點:a)它提供了一個基于案例推理技術的仿真模型分類結構,可以動態調整模型數據庫結構以滿足實際系統需求;b)具有測試仿真模型和真實系統匹配度的功能;c)具有一個系統辯識工具,可以從實際的實驗結果中提取精確模型,并重構動態模型庫。這些優點可以有效解決以前靜態模型庫帶給仿真實驗的問題:動態仿真模型庫具有動態和自適應的能力,可以滿足更加廣泛的需求。運行環境仿真系統另一個關注的是建立硬件在環測試系統。以虛擬儀器技術為基礎,這項工作變的更加容易。具體的結構和開發方法將在后面介紹。
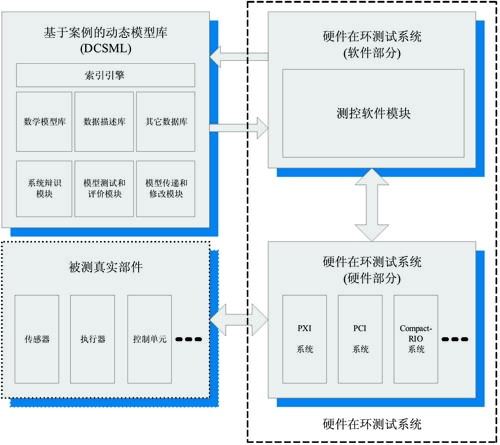
圖1 運行環境仿真系統結構圖
運行環境仿真系統的結構和開發方法
運行環境仿真系統包含兩個部分:一是動態案例模型庫,二是硬件在環測試系統。具體結構見圖1。
動態案例模型庫主要包括幾個模塊,索引引擎,數學模型庫,數據描述庫,其它數據庫,動態辯識模塊,模型測試和評價模塊。
硬件在環測試系統可以分為軟件和硬件部分。軟件部分主要是測控軟件模塊;硬件部分包括全部硬件系統,如PXI總線系統,PCI總線系統,Compact-RIO系統等。
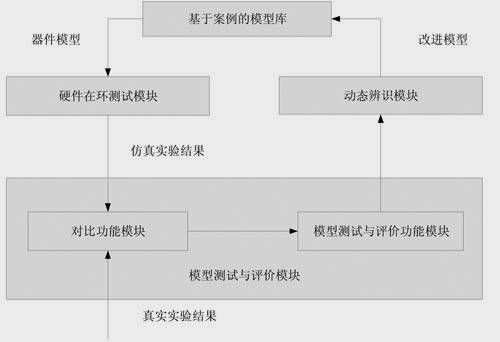
圖2 動態案例模型庫的結構圖
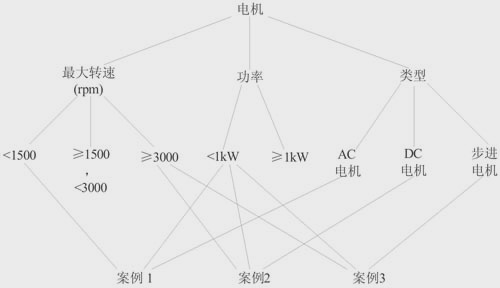
圖3 簡化電機模型分類
動態案例模型庫
動態案例模型庫的開發主要以NI LabVIEW 仿真模塊,Matlab,和其它仿真工具包為基礎進行。這些工具為建立機電系統的模型庫提供了一個完整的平臺。動態案例模型庫包含三個主要部分:案例模型庫(索引引擎,數學模型庫,數據描述庫,其它數據庫),系統辯識軟件模塊,模型測試和評價模塊,模型傳輸和修改模塊。主要結構見圖2。
案例模型庫
模型庫采用案例推理技術實現,這項技術在80年代后期逐漸被越來越多的人工智能研究人員關注,它是一種利用過去案例和經驗解決問題的類推方法。總的來說,案例推理技術采用以下的推理步驟:
確認問題、獲取案例、修改案例、存儲案例。
案例推理技術最重要的部分是建立案例的索引引擎和設計索引算法。我們可以利用這個技術建立案例數據庫。整個數據庫將來可以建立成 具有可重構特性的分布式網絡結構。它最主要的優勢在于能夠根據用戶需求重構分布式網絡,并快速引導到合適的案例。這項技術具有很強的自適應能力。
在這個模型庫中,機電系統和部件的模型可以分為幾個主要部分,如機械,電子電氣,液壓等。這些分類組建成一個樹型結構。例如,電子電氣組件可以分為微處理器,執行器,驅動系統,傳感器等。進一步,執行器還可按照不同的類型,功率,最大轉速,驅動方式等再進行分類。圖3給出了一個簡化的電機分類的例子。其中案例1代表模型庫中的一個原始模型。
根據以上的分類,我們可以對不同的模型獲得多種快速,有效的索引方法。例如,如圖3所示,現在在這個模型庫中具有三個案例,每個代表一種類型的電機模型。如果現在我們需要得到功率大于1kW,最大速度大于3000rpm的交流電機模型,但目前在圖3所示的庫中沒有匹配的模型。案例模型庫將自動建立一個新的案例,并重構模型庫,重構的模型庫結構如圖4所示,以上的例子解釋了模型庫重構的方法。
模型測試和評價模塊
模型測試和評價模塊主要包括兩個部分(見圖2)。第一部分完成仿真實驗結果和實際實驗結果的對比,判定兩者之間的差異;第二部分測試和評價仿真模型是否對應實際的部件和系統。在獲得實驗結果后,案例模型數據庫會自動選擇相關的模型和仿真實驗結果提供給測試過程。模型測試和評價的兩個功能描述如下:
對比功能:對比仿真實驗結果和真實實驗結果的有效辦法是計算兩者輸出數據的差異。我們同樣可以對比兩者系統參數,性能指標,動態特征圖等方面的誤差。經過對比,這些誤差將提供到模型測試和評價模塊;
模型測試和評價功能:如果誤差序列是具有零均值和非常小的方差的白噪聲序列,可以判定仿真模型和實際系統非常接近,模型不需要修改或者重構。否則,必須修改仿真模型或重構來提高匹配精度。
動態辯識模塊
如果模型測試和評價結果說明相關的模型必須進行修改或者重構,動態辯識模塊就要進入工作。動態辯識模塊將利用真實實驗結果獲得新的模型,并進行模型校準和修改。
現代系統辯識理論在這個模塊中擔負著重要的責任。系統辯識主要根據被辯識系統的輸入輸出獲取等效的系統(數學模型)。通用的模型描述方法包括傳遞函數,狀態方程和微分方程等。傳遞函數的辯識方法分為時域和頻域方法。狀態方程的辯識方法比較復雜,可以從微分方程或傳遞函數轉化過來。微分方程的辯識主要是采用統計分析和參數預估,如最小二乘,最大似然等方法。非線性系統可以采用非線性微分方程,Volterra級數,雙線性模型等來描述。
對于不同的部件和系統,我們需要選擇不同的模型來描述。甚至對于同一個部件,都需要建立不同的描述方法以滿足不同的需要。在系統辯識的開始階段,首先要根據實際需求選擇正確合適的數學模型的類型。然后,下一步是選擇合適的辯識方法通過實際實驗數據獲得模型參數。舉例說明,一個電機可以描述成一個線性模型,也可以描述成一個非線性模型。根據所需的仿真精度和功能,我們可以選擇一個單入單出的傳遞函數,也可以使用最小二乘方法構建Volterra級數模型。在這里,許多現代人工智能理論可以采用進行辯識,如人工神經網絡,模糊邏輯,H∞ ,遺傳算法等。
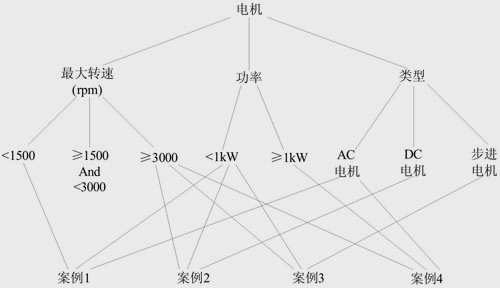
圖4 重構的簡化電機模型庫結構
系統辯識模塊主要完成以下功能:
根據所需的仿真精度和仿真器功能,選擇合適的數學模型來描述實際系統;
選擇合適的系統辯識方法以獲得所需的模型參數和其它描述;
測試數學模型的精度。
經過以上的辯識工作,改進的或新的數學模型將進入案例模型庫。案例模型庫,模型測試和評價模塊,動態辯識模塊這三個部分的工作形成了一個閉環,從而保證了整個模型庫的自適應性能,并組成了整個動態案例模型庫。
硬件在環測試系統
硬件在環測試系統最初是被構思成一個單一功能的測試系統,在汽車行業中的應用最主要是用于發動機控制元件的測試。現在,越來越多的電子控制元件和其他通用的測試應用都逐漸采用了硬件在環技術來實現。工程技術人員面對的建立硬件在環測試系統的主要問題是如何將仿真系統和實際系統通過大量高速的I/O通道和信號調理通道同步運行起來,并保證功能和性能。隨著現在計算機的功能和靈活性越來越強,工程師和科研人員更傾向于使用虛擬儀器來實現硬件在環測試系統。
通過使用虛擬儀器技術,硬件在環測試系統的實現變的越來越容易。圖5是一個硬件在環測試實現的具體例子。這個程序采用LabVIEW實現,一個采用傳遞函數描述的數學模型嵌入了測試的過程,從而實現了實際系統和數學模型混合的硬件在環測試流程。
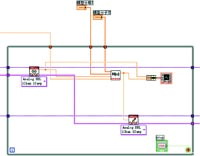
圖5 硬件在環測試示例
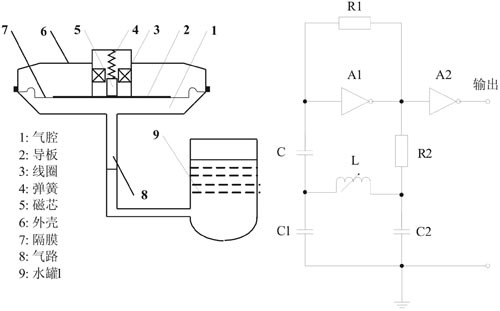
圖6 鑒頻式水位傳感器的結構圖 圖7 鑒頻式水位傳感器的等效電路圖
這種實現方法可以把許多機電產品通過不同的描述方式引入到測控系統中,這些不同的描述方式包括數學模型,數據表,數據圖等等。通過與動態案例仿真模型庫的有機結合,這些模型將加入仿真模型庫中。這樣硬件在環測試系統就具有了堅實的模型庫作為資源中心了。
洗衣機主控板測試系統簡介
主控板是全自動洗衣機的核心控制單元。在裝配結束后,必須對主控板的功能和輸入/輸出接口進行測試。主要的測試目標包括門開關信號,關斷信號,水位信號,進水閥控制信號,驅動控制信號,電機控制信號等等。為了完成上述工作,需要通過測試系統自行產生仿真信號,因此我們基于運行環境仿真系統開發了洗衣機主控板測試系統。這套系統采用NI公司多功能板卡和LabVIEW軟件平臺實現了模擬洗衣機正常工作狀態和全自動測試的工作。下面我們將介紹這個具有一定代表性的運行環境仿真系統的開發方法。
首先,我們提取與主控板緊密聯系的部件的仿真模型,如鑒頻式水位傳感器,電機,入水閥等。其中,鑒頻式水位傳感器很具有代表性。下面先簡要介紹如何建立鑒頻式水位傳感器的仿真模型。
鑒頻式水位傳感器的結構見圖6。它采用LC電磁諧振電路作為敏感元件,將水位信號轉變成LC參數變化,最后輸出頻率信號。原理可以簡單描述如下:水位首先影響在氣腔內的氣壓,氣壓的改變使導板運動,磁芯也就在線圈中移動,這就改變了線圈的電感,最終LC電路產生了不同的頻率信號。鑒頻式水位傳感器的等效電路見圖7。
一般來說,在鑒頻式水位傳感器安裝固定后,它的線圈匝數,空氣導磁率,磁芯導磁率,線圈平均半徑,磁芯有效半徑,和線圈長度都是不變的,唯一改變的是磁芯在線圈中移動的位置。這個運動是線性的,也就導致電感的改變是連續的。通過理論分析和實驗驗證,水位信號和鑒頻式水位傳感器的輸出頻率是成反比關系。
下面給出了兩種比較常用的鑒頻式水位傳感器產品的特性表,描述了水位和輸出頻率的對應關系,第一個是SW-4型,第二個是XQB52-108G型。
通過實驗結果和數學分析,我們獲得了不同鑒頻式水位傳感器的數學描述方法。這個方法同樣應用于其他部件的仿真數學描述, 并將這些數學描述加入動態案例仿真模型庫以便下一步建立全自動洗衣機主控板測試系統。
隨后,我們采用虛擬儀器技術開發了整套硬件在環測試系統。選擇了NI公司M系列多功能卡作為數據采集模塊,NI的LabVIEW軟件平臺開發了整套測試軟件。根據硬件輸出模擬了主要的傳感器和執行元件的信號,如門開關信號,關斷信號,水位信號,進水閥控制信號,驅動器控制信號,電機控制信號等,最終完成了全自動洗衣機漂洗,洗滌,甩干等狀態的全自動測試工作。
結語
運行環境仿真系統具有兩個重要的組成部分:動態案例仿真模型庫和基于虛擬儀器的硬件在環測試系統。前者主要用于擴展真實部件和系統的數學描述范圍,采用案例推理方式合理分類;后者主要針對如何通過使用數學描述方法實現實際的測控系統,以減少開發難度、費用和其他投資。這兩部分具有非常密切的關系,但兩者是相對獨立的系統。運行環境仿真系統為這兩者搭建了一座橋梁,從而使真實對象與虛擬運行環境中的仿真對象緊密結合形成更高層次的測控系統。
今后的工作主要在下面介紹的兩方面開展:首先是提高模型建立和索引引擎的質量,擴展仿真模型的類型,簡化數學描述形式;其次是在硬件在環仿真技術,實時測控環境,分布式通訊技術等方面進一步提高。這兩方面的工作必將會使運行環境仿真技術提升到一個更高的技術層次,為現代工業提供更好、更實用的開發和測試工具。


評論