也談LED驅動
——

LED:本文所說的LED主要是指下列幾種:
7-段數碼LED,分共陰和共陽兩種,原理圖見1和2;

常用nxm LED點陣:如8x8 LED 點陣模塊、5x7 LED點陣模塊等,其也分為共陰和共陽兩種;
單個LED管。
所謂共陰極,即是將所有LED的陰極連接到一起,而共陽極則相反,所有的陽極被連接到了一起。但不管哪種結構,其顯示設計的原理基本相同,唯一的是其驅動的電路的設計有所差異,一般共陰極采用推(Push)電流的方式來驅動,而共陽極結構則采用拉(Pull)電流的方式來驅動。
根據LED顯示的硬件設計方法的不同,LED顯示驅動分為靜態法和動態法兩大類,其具體的說明和編程方法分述如下:
1.靜態顯示驅動法:
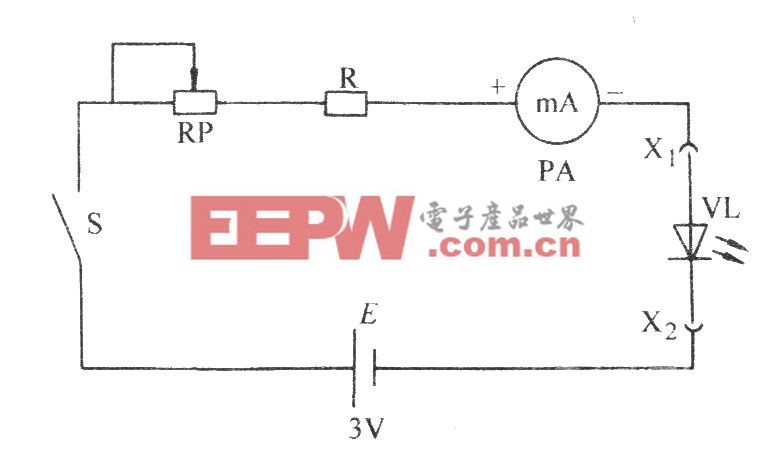
所謂靜態顯示驅動法,即是指每一個LED燈分別對應一個獨立的IO驅動口;其點亮和關閉由該IO來對其進行控制,互不干擾,見圖3(注:對于IO驅動能力弱的MCU,必須增加外部的驅動芯片或驅動三極管等器件)。此種設計一般應用在對單個LED的驅動或LED數量較少,且所選的MCU IO比較充裕的情況下。比如一些項目的LED指示燈、產品的設計中只有一個7-段LED碼需要顯示等。
由于每一個LED均由獨立的IO口來控制,因此此種顯示驅動的軟件設計比較簡單明了,無需特別的處理,在需要點亮和關閉時設置相應的IO輸出口的電平即可(即“0”或“1”,具體須根據驅動電路的設計來決定)。

圖 3
優點:電路設計簡單,編程簡單,而且LED的亮度控制容易,只需在驅動端增加相應的電流調節電阻即可方便地實現亮度的調節(對于存在獨立驅動的設計,還可以通過調整驅動電壓來達到亮度的調節)。
缺點:由于每一個LED燈需要一個IO口,因此對IO口的需求較大,不易實現大數量的LED驅動和顯示,擴展性能差。
2. 動態的顯示驅動法:
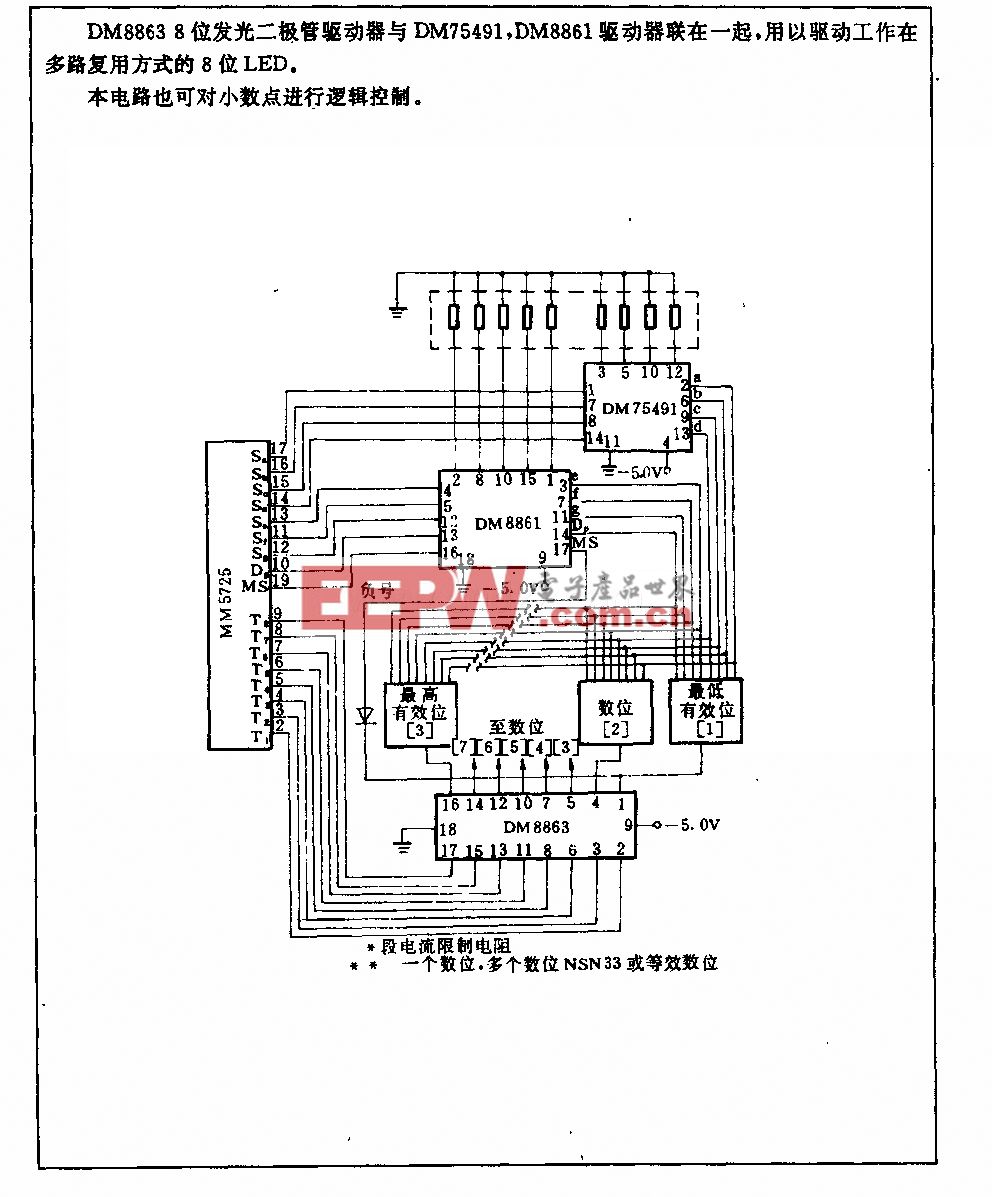
與靜態顯示方法不同,動態LED顯示的設計方法是將不同LED模塊的所有的LED的驅動端一對一地連接到一起,見圖4,而將其公共極(陰極或陽極)分別由不同的IO口來驅動(主要針對7-段碼和LED點陣模塊)。在此,我們稱其公共極為掃描線或地址線(因此種連接方法類似于存儲器的內部連接,每個LED點相當與Memory中的一個Bit),不同的LED模塊(類似于Memory中的一個Byte)用不同的掃描線地址線來進行選定。

由于所有的LED模塊公用了驅動端,因此LED的驅動不再像靜態法一樣為每個LED所獨享,因此其驅動的設計方法也與靜態法完全不同,需要采用分時掃描(也稱動態掃描)方法來實現對所有LED的顯示驅動,其原理如下(以圖4為例):
a. 將A0設置為高電平,也即允許第一組LED顯示,同時將A2,A3,A4設置為低電平,也即關閉該陰極所對應的LED組的顯示;
b.在P0口輸出A0組對應的顯示數據(也稱為Pattern),如字符點陣數據,7-段碼對應的數字的數據等,該數據可以通過ROM表的形式來預先定義;
c. 保持一定的時間T,該時間即為所設定定時器的中斷時間;
d. 將A0口設置為低電平,關閉A0組LED的顯示;
e.將A1設置為高電平,其他幾個設置為低電平,開啟A1組對應的LED的顯示;
f. 在P0口輸出A1組對應的顯示數據(也稱為Pattern,意義同上);
g.重復以上步驟,直到所有組被掃描一遍,然后又從A0組開始下一個循環,如此周而復始,實現所有LED的動態顯示。
該方法的原理利用了人眼對物體的視覺延遲來達到所有LED的同時顯示,實際上,在每一個時刻,只有一組LED是處于顯示的狀態,而其他LED組均為關閉狀態。理論上,若兩次顯示之間的時間間隔小于32ms時,人眼即無法分辨,因此,為了達到此要求,LED的掃描頻率一般可按照下式計算得出:
f = 32 * N
式中,
f為掃描的頻率,對應為定時器的定時時間(T=1/f);
32 則是由32ms換算而來,32ms對應的頻率剛好為 32Hz;
N則是總的LED的組數(此例中為N=4)。
根據此式算出的掃描頻率f實際上是LED 驅動掃描的最小頻率,若低于此頻率,則有可能導致LED的閃爍。當然,f也不可能越高越好,掃描的頻率太高,相對而言,每一組LED的點亮的時間就越短,因此有可能導致LED的亮度不夠或顯示效果不理想等一些問題。當然提高LED的驅動電壓也可以彌補由此造成的亮度不夠的問題。
此例中,由公式可知其掃描的頻率應大于等于128Hz,則較為理想。
2. MCU程序的實現:
a.模塊的劃分:
在說明其編程之前,先說明一下模塊化編程思想在LED驅動設計中的應用。為了使程序的結構清晰和維護的便利,特別是為了使程序的移植等變得可行,在程序的設計過程中應盡可能地采用模塊化的設計思想,對于復雜的程序結構和功能的實現,更應該在編程之前理順其相互之間的關系,劃分好各功能模塊所應完成的功能,定義好各模塊之間的數據接口和相互關系。
一般而言,顯示部分所涉及到的內容和功能相對較廣,比如按鍵的變化、系統狀態的變化、數據的變化等均需在顯示的結果上表現出來。因此,為了保證不同的模塊之間的獨立性,我們將與LED顯示的有關的功能進行如下的劃分:
1. 掃描驅動模塊:此模塊的功能只完成對所有LED的掃描,而不關心所顯示的數據的具體變化情況,其從固定的顯示緩沖其中提取每一掃描地址所對應的數據,該對應關系是固定的,由程序設計時來設定。該實現的方法類似與PC機中CRT的顯示驅動和顯示緩沖;
2.字符、點陣發生器:由于實際的數據與顯示的數據(Pattern)之間并非是相同的,因此,需要將實際的數據轉化成能夠顯示的數據。例如在MCU中的各種計算的數據是以BCD碼或二進制碼的形式來表示的,需要將其轉化成7-段碼或nxn點陣的Pattern數據進行顯示;
3.顯示緩沖刷新和處理模塊:該模塊的功能是接受諸如按鍵、系統狀態變化、數據變化所引起的顯示數據的變化。其需要調用到字符、點陣發生器來完成顯示緩沖的刷新,其與按鍵、系統狀態變化等之間的接口是采用消息的機制來實現。該模塊一般需要根據不同的顯示內容來進行分類,比如在跑步機的設計中,可以劃分為如下的內容:距離、速度、時間、能量消耗、心率及其他相關的數據。

b.程序架構和實現
1.掃描模塊的實現:由于LED的掃描驅動是一個重復的不間斷的過程,自然,定時中斷是最好的實現方法,其流程如圖6所示,其中BuffPt用于指向當前的顯示緩沖區,Ai則為當前所需顯示的LED組的地址編號,從0到N(N為總的LED組數);
2.刷新模塊的實現:在MCU的程序設計中,一般將此模塊置于16Hz的定時中斷中(若主程序的循環周期不固定且最大的循環時間大于1/10秒時,常采用此架構)或主程序循環體中(此種情況主要時針對MCU時鐘比較高的場合或不需考慮顯示延時的情況下),通過檢測對應的消息來決定其是否需要執行數據的刷新。以跑步機的設計為例,其功能流程如圖7所示;
3.字符、點陣發生器:由于在一些實際的應用中,可能的顯示內容原則上是可預知的和有限的,特別是漢字的顯示,因此其主要是通過定義相應的點陣來保存各種需要顯示數據。為了便于程序的設計,一般需將其按照一定的排列規則來進行定義,同時也需要為各個需要顯示的字符和圖符進行編碼,編碼的規則必須有利于程序的設計和提高代碼的效率,以求能夠采用統一的查表指令來實現。

圖6
注:上述的流程只是一個原理性的程序說明,在實際的應用中,需要根據MCU的特點及具體的硬件設計來進行程序的設計與簡化。比如:在實際的項目中有8x8(或小于8x8)個LED需要驅動,而且所選的MCU又是8位或16位的,則此時的地址線的掃描將變得非常的簡單,只要建立字節變量Ai,其初始值為0x01,然后在每次中斷處理程序中需將Ai直接輸出到LED掃描線所對應的IO口即可,隨后將Ai左移一位,對8x8 LED情況,當Ai=0時,表示一遍掃描完成,此時再將Ai設為0x01即可。對于顯示的緩沖區的分配,同樣可以根據實際的軟件設計來分配具體的RAM地址空間,以進一步提高程序的執行效率。記住,由于LED的掃描需要占用較多的MCU時間,因此在進行掃描驅動的程序設計時,需要盡可能采用簡潔高效的代碼,以便提高MCU的工作效率。舉例來說,假如需驅動8x8 LED,根據前面所講的要求,所需的定時器的中斷頻率必須是大于等于8x32,即256Hz,若在此驅動代碼中多增加一條語句,則MCU每秒就需要多執行256條代碼,由此可見高效的代碼對于LED驅動程序來講是多么重要,特別是當MCU的時鐘不夠快時!







評論