一種基于DSP的MIMO系統空時編碼盲識別方法

系統復位時,所有FLAG PIN置高電平,ADC采集完畢觸發DMA中斷,從SDRAM中讀取數據,并進入到預白化處理,此時FLAG PIN1至低電平,依據算法,對白化后的數據進行時滯相關分析,并利用碼字表判決響應碼型時,并分別拉低FLAG PIN2和FLAG PIN3.
本文引用地址:http://www.j9360.com/article/272884.htm該種方法配置靈活、軟件簡單,系統采用4個FLAGPIN來布置顯示,DSP擁有足夠的IO接口使用,在設計時充分利用了硬件資源,同時利用DMA中斷,有效提高了CPU的效率,也實現了資源的共享和并行處理,同時還在芯片運算過程中及時發現故障并定位處理。
2系統軟件設計
2.1空時編碼盲識別原理
STBC通過在時間與空間進行聯合編碼達到提高系統傳輸性能的目的,因此在不同時刻從不同天線發送的數據具有一定的相關性,而不同空時編碼之間的相關度并不同,因此可利用該相關度來區分不同的碼型,從而將空時編碼的模式識別出來。
2.2空時編碼盲識別方法
(1)預白化。預白化的目的是去除信道對接收信號相關性的影響。白化矩陣W通過對分時相關矩陣P做特征值分解得到
,其中A-1為特征值矩陣Λ的廣義逆。W與原數據相乘便可得到解相關矩陣Y.(2)計算時滯相關度。利用接收信號預白化后得到的解相關矩陣Y,依據統計學公式計算時滯相關范數
空時編碼矩陣的理論時滯相關特性僅與編碼矩陣本身有關。因此,應用與式(1)相同的形式,可將編碼矩陣不同的列進行矩陣乘加運算,并取F范數來表征。
由此得出計算空時編碼的時滯相關矩陣R(τ)
其中,空時編碼矩陣的每一列代表不同的發射時刻,A(u)是碼型A編碼矩陣的第u列,l為碼型分組長度。已預白化后的接收信號矩陣與發送端編碼矩陣,在時滯相關函數F范數上有如下關系
(3)判決碼型。遍歷候選碼集,計算出接收信號與候選碼集中每一種空時碼的相關度,取其中最相關的碼型便為判決碼型。
2.3軟件設計
軟件系統采用模塊化結構軟件系統采用模塊化結構設計,程序流程如圖5所示。包括系統啟動、配置系統寄存器、設置全局變量和開啟中斷控制等。當ADC模塊將采樣數據全部寫入SDRAM后,CPLD通知DSP觸發DMA中斷1,將SDRAM中的數據讀入DSP,讀取結束后DMA觸發中斷2,并對ADC采樣數據進行處理:(1)預白化,去除新到對采樣數據相關性的影響。(2)計算采樣數據與候選集中每種碼字的時滯相關度。(3)根據上述計算結果,選取使時滯相關度最小的碼型為判決碼型。
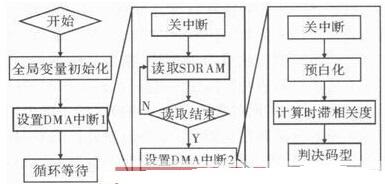
圖5 軟件系統采用模塊化結構
通過對DMAC寄存器的設置,可控制DMA的流向、通道和方式,典型的數據讀取關鍵代碼如下:
數據處理部分的關鍵函數包括白化和時滯相關量計算,數據傳遞采用了單維讀入與多維傳遞的方式,即將多天線的數據按照天線順序依次讀入,但在DSP內部數據傳遞時,多根天線的數據按照時間順序傳遞,在函數內部手動尋址,即符合算法要求,又加快了數據處理的速度。數據處理時包括大量的矩陣轉置和乘加操作,在計算時優化為內積計算模式,使用ALU運算塊X和Y,每個周期并行計算時滯矩陣兩列之間的相關范數,這便節省了內存資源,減少了尋址次數,且加快了計算速度。
本算法在不同參數下的Matlab性能仿真如圖6所示,采樣數據越長,接收天線數越多,識別性能也越好。實際測試證明與期望相一致,驗證了設計的合理性和正確性。
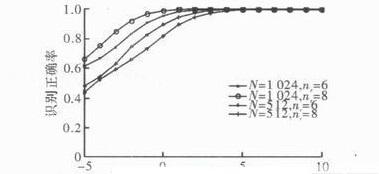
圖6 算法在不同參數下的Matlab性能仿真

c++相關文章:c++教程
塵埃粒子計數器相關文章:塵埃粒子計數器原理 晶振相關文章:晶振原理 上拉電阻相關文章:上拉電阻原理









評論