典型的傳感器融合軟件架構

現實世界設計傳感器融合是一個高度專業化的設計領域,需要熟練掌握建模和仿真技術。它要求盡最大可能地理解傳感器的工作細節以及它們的缺點和交互情況。多年來,人們的關注點已經被帶進導航、智能手機應用和游戲等領域。但直到現在,借助大量知識的儲備和累積,才使得人們可以獲得真實和精確的結果。
本文引用地址:http://www.j9360.com/article/272806.htm在基于傳感器融合的系統中,操作需要進行精細調整。現實世界中沒有什么事像“即插即用”這么簡單。一個系統的試運行要求必須調整參數,而且每個傳感器的操作之間存在交互,因此很容易變成高度復雜的反復過程。如今的軟件具有以很高層次執行這種“精細調整”的能力,并且可以向OEM廠商提供簡單直觀的濾波器調整程序(圖1)。

圖1 典型的傳感器融合軟件架構
預定義濾波器使得精細調整速度更快既然傳感器融合操作的精細調整已發展并簡化成了濾波器調整任務,它就給開發人員提供了一個有價值的機會。通過適當調整濾波器,開發人員或OEM廠商可以讓最終產品以市場差異化的方式運行。由于所有權衡管理都是自動完成的,開發人員可以做出有效的決策,例如在最高穩定性和最高性能之間做出權衡,以便適應最終目標市場。
關鍵性能指標測量設置所有傳感器融合技術并不等同。在現有的實現技術和測試方面,不同供應商之間有很大差異。為了得到正確結果,必須采用含有經過驗證的精確庫的正確軟件方法。
所有硬件在接口和時序參數方面必須兼容和匹配。合理的方法是確保攝像頭系統的性能,這些系統將通過跟蹤物體上的標記根據物體(本例中是智能手機)移動產生方位矢量。方位矢量再與傳感器創建的、用數據記錄應用同時記錄的矢量進行比較。使用這種基于攝像機的系統允許對最終商用設備進行直接比較。
靜態精度靜態精度被定義為設備置于穩定位置時,測量到的設備方位與實際設備方位之間的偏差。為了計算靜態精度,需要手機在多個位置靜止放置時收集航向、俯仰和滾轉方面的成套數據。一個設備的靜態精度主要受磁力計和陀螺儀的硬件參數以及軟件中給它們分別分配的權重影響。在具有低靜態精度值的設備中,最終用戶可以在羅盤或地圖應用的絕對航向中看到很大偏差,當設備處于靜態狀態,他們還能在交互式應用中見到抖動(很小的旋轉移動)。這是由于軟件校正陀螺儀漂移引起的。
動態精度動態精度被定義為設備在運動時,測量到的設備方位與實際設備方位之間的偏差。由于在運動期間涉及到旋轉加速度,測量起來更加困難。動態精度是在手機以不同運動模式(8字舞、慢速線性、快速和慢速旋轉以及游戲動作)運動時,通過采集航向、俯仰和滾轉等成套數據進行計算的。所有數據都以最快可能的數據速率進行采集。
在具有低動態精度的設備中,最終用戶可以看到屏幕上的移動與設備實際運動之間有很大偏差。這在增強現實應用中特別引人注意,因為增強單元的移動與現實世界不是同步的。這也是用戶在使用虛擬現實幾分鐘后就感到不滿意的原因之一。
雖然直接關系不是很明顯,但大誤差的動態精度也是室內導航應用性能差的主要原因。由于用戶在已知固定點之間導航(比如從Wi-Fi或藍牙信標開始),傳感器數據可用于計算軌跡。然而,航向誤差將隨著時間的推移而累積,因此具有15°較差動態精度的設備很容易在20s~30s時間內產生超過100°的累積誤差。諸如地圖匹配等更高層處理也許可以做些修正,但代價是更大的功耗(圖2)。
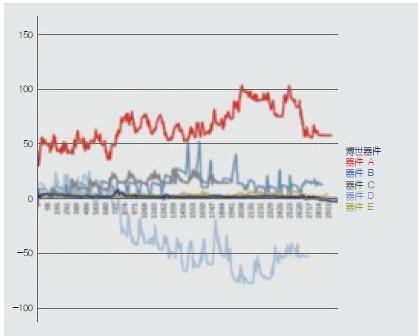
圖2 方位隨時間發生偏離

傳感器相關文章:傳感器工作原理
風速傳感器相關文章:風速傳感器原理 矢量控制相關文章:矢量控制原理











評論