基于LabVIEW的數控機床網絡測控系統--基于B/S模式的軟件設計 (一)

5 基于B/S模式的數控機床網絡測控系統軟件設計
本文引用地址:http://www.j9360.com/article/270598.htm5.1下位測控機的數據采集、顯示及存儲回放軟件設計
下位機測控服務器系統軟件包括接口儀器驅動軟件和應用軟件兩部分。其中,接口儀器驅動程序是完成對某一特定儀器的控制與通信的軟件程序集合,是連接上層易用軟件和底層軟件的紐帶和橋梁。每個儀器模塊都有自己的軟件驅動程序,儀器廠商將其以源碼的形式提供給用戶,用戶在應用程序中調用儀器驅動程序。應用程序包含兩方面的程序:實現虛擬面板功能的前面板軟件程序和定義測試功能的流程圖軟件程序。它主要功能是給用戶提供操作儀器、顯示數據的人機接口;實現數據的采集、分析處理、顯示、存儲等;并將需要在客戶端顯示的數據發送到Web服務器,同時從Web服務器接收來自遠程客戶端的控制命令。
5.1.1數控機床測控軟件的結構化設計
本文中數控機床數據采集系統的軟件基本結構包括數據采集、數據處理、存儲回放及用戶界面等幾部分。測控軟件設計時可以采用面向對象的設計分析方法,通過仔細地規劃和設計,使程序結構清晰,便于維護、修改、增加。軟件程序結構圖如圖5.1所示。
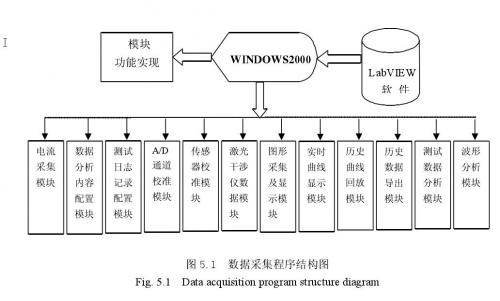
結構化的程序主要包含以下功能模塊(結構圖見上圖5.1所示):
①A/D通道校準模塊
采集之前對采集通道校準以保證A/D通道的準確度。
②電流采集模塊
電流采集模塊采用AD轉換器的數據采集卡,試驗中采集數控機床的消耗電流。
RRBDP軟件對采集到的數據進行各種形式的濾波,曲線擬合、平滑等處理。
③傳感器校準模塊
對電流傳感器做標定以確保傳感器輸出信號盡可能接近真實值。
④激光干涉儀數據模塊
通過USB接口通訊,獲取干涉儀采集的長度并經過分析后送往其它模塊。
⑤攝像頭數據采集及顯示模塊
該模塊負責完成視頻采集顯示和分析數控機床運動情況。
⑥測試數據分析模塊
對測試數據進行分析、匹配,建立數學模型并送往曲線顯示模塊。
⑦實時曲線顯示模塊
實時顯示消耗電流、定位精度以及坐標的關系曲線,采用具有很好的視覺效果的LabVIEW中的XY圖來繪制曲線控件驅動。波形直觀、精細、易于觀察。
⑧波形分析模塊
對關系曲線(即波形)依據需要研究的分項進行分析,將分析結果及波形做為輸出數據以特定文件格式存儲起來。
⑨測試日志記錄配置模塊
記錄試驗數控機床的信息、試驗次數、試驗日期、試驗人員以及輸出數據文件目錄。
⑩歷史曲線回放模塊及歷史數據
導出模塊載入以前試驗后生成的數據和波形文件并回放出來,確保以前的試驗結果可追溯。
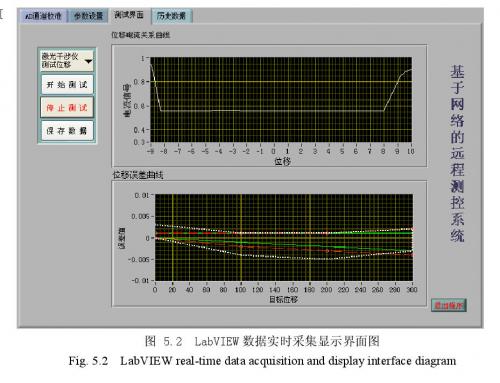
5.1.2數據顯示與存儲回放程序的設計
本章數據顯示與存儲回放程序設計所需的基礎知識包括:數控編程、數控機床操作、電路基礎、VC++、C++、Web Service、LabVIEW和測試儀器等。基于以上程序開發結構和基礎,設計的各功能模塊顯示界面如下圖5.2所示:

c++相關文章:c++教程
干涉儀相關文章:干涉儀原理











評論