采用ATMEGA16單片機設計的兩輪自平衡電動車

近兩年來,在公共場合常常能見到一種叫做體感車(或者叫平衡電動車)的代步工具,由于其便捷靈活,使得其頗為流行,并被稱為“最后一公里神器”。其運作原理主要是建立在一種被稱為“動態穩定”的基本原理上,也就是車輛本身的自動平衡能力。以內置的精密固態陀螺儀來判斷車身所處的姿勢狀態,透過精密且高速的中央微處理器計算出適當的指令后,驅動馬達來做到平衡的效果。
本文引用地址:http://www.j9360.com/article/269736.htm下文采用AVR Atmega16芯片作為主控制芯片,設計制作了兩輪的自平衡電動車。文中分析了測量角度和角速度傳感器的選擇,通過Atmega16單片機多路信號AD采集陀螺儀和加速度計的信號,經過Kalman濾波算法計算動態的角度和角速度,通過LCD1602顯示角速度和角度的值、轉向值。利用PID控制算法控制自平衡車的平衡狀態,使車體在平衡位置穩定。利用大功率MOS管設計驅動電路,通過單片機有效地控制電機的轉速、電機的轉向,從而有效地控制自平衡車的前進、后退及轉彎功能。我們來看看具體的設計細節吧。
1研究意義
隨著科學技術水平的不斷進步,交通工具正朝著小型、節能、環保的方向發展,“電動車”正是在這個背景下孕育而生并為人們所熟識。據不完全統計,我國的電動車保有量已超過1.2億輛,是增長速度最快的交通工具。隨著石油儲量的不斷減少和人們環保意識的增強,“電動車”無疑將成為未來交通工具的主力軍。就目前而言,電動車的種類主要有電動自行車、電動摩托車和電動汽車。由于電動機制造水平的提高,尤其是大功率直流無刷電動機制造工藝的成熟,帶動了電動自行車和電動摩托車行業的飛速發展。同時,人們也根據兩輪自平衡機器人工作原理,設計出了一些新式電動車——兩輪自平衡電動車。它是一種新型的交通工具,它一改電動自行車和摩托車車輪前后排列方式,而是采用兩輪并排固定的方式,這種結構將給人們帶來一種全新的駕馭感受。兩輪自平衡電動車僅靠兩個輪子支撐車體,采用蓄電池提供動力,由電動機驅動,采用微處理器、姿態感知系統、控制算法及車體機械裝置共同協調控制車體的平衡,僅靠人體重心的改變便可以實現車輛的啟動、加速、減速、停止等功能。兩輪自平衡車主要是綠色環保。電動車使用電池作為動力能源,并可以反復充電使用,大大減少了對環境的污染。轉彎半徑為零,在小空間范圍內可以靈活運動。無剎車系統,由CPU自動給出正反轉力矩,從而達到快速穩定的剎車效果。
控制極其方便,前進后退自如。兩輪自平衡電動車是一個高度不穩定的系統,其動力學方程是一多變量、嚴重不穩定、耦合、時變、參數不確定性的非線性高階方程,加上運動學方程中的非完整性約束,要求完成的控制任務也具有多重性,因此,兩輪自平衡電動車作為一個具體的復雜系統,給控制理論提出了很大的挑戰,是檢驗各種控制方法處理能力的典型裝置。兩輪自平衡電動車作為一種研究裝置,可進行不確定性系統控制、非線性系統控制、自適應控制、智能控制等研究。
2系統總體設計方案
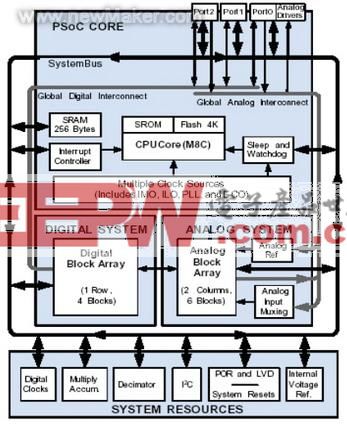
兩輪自平衡自動車采用AVR Atmega16芯片作為主控制芯片,選擇外部16 MHz晶振,使用JTAG仿真器進行實時仿真與調試;采用LCD1602顯示轉彎角度傳感器測量的動態角度和角速度,為了讓調試的過程中更加直觀。動態角度和角速度的測量通過陀螺儀測量角速度,三軸加速度計測量角度。由于平衡車是運動的,所以三軸加速度計測量的角度里面參雜動態角度,最終通過卡爾曼硬件融合電路精確地測量出動態的角度和角速度。轉向模塊采用高精度電位器,當手把向右偏轉時,兩輪車向右轉,當手把向左偏轉時兩輪自平衡車向左轉彎,可以實現原地轉彎。電機采用直流減速電機,主要是因為直流減速電機能耗低、性能優越、減速機效率高達95%以上,而且振動小、噪音低、節能高、選用優質段鋼材料,鋼性鑄鐵箱體,齒輪表面經過高頻熱處理。節省空間,可靠耐用,承受過載能力高,經過精密加工,確保定位精度,扭矩大。電機驅動模塊采用大功率MOS管,由于電機的功率大,需要的電流大。電機的轉動通過PID控制算法,實現兩輪車的自平衡狀態。系統簡易硬件結構框圖如圖1所示。
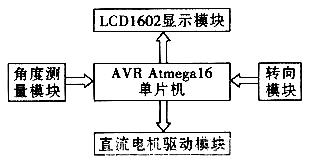
圖1系統簡易硬件結構框圖
2.1車模直立控制方案
兩輪白平衡車的直立是通過負反饋來實現的,但是兩輪自平衡車的直立相對木棒的直立是相對簡單的,木棒的直立是二維的而自平衡車有兩個輪子著地且直立是一維的。所以通過控制輪子的轉動,抵消傾斜的趨勢便可以很好地保持車體直立。兩輪自平衡車模型如圖2所示。
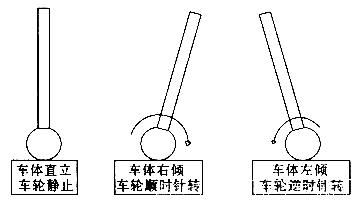
圖2兩輪自平衡車模型圖
兩輪自平衡車之所以在不加外力的情況下不能夠直立,是因為車體的偏轉方向和受力方向是在同一方向,所以車體會加速倒下,如果要車體直立不倒下那就需要添加外力作用才能夠保持平衡狀態,這個外力就是車輪對地的摩擦力。由于電機在轉動時給地面一個摩擦力,根據牛頓第三定律,地面給車體一個與相對運動方向相反的作用力,這樣才會不至于讓車體加速倒下。
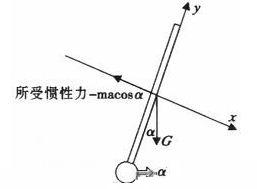
圖3受力分析圖
兩輪自平衡車的受力分析:
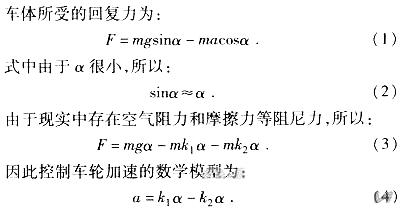
兩輪自平衡車的受力分析


評論